CodeandModeareusedtosetSSImodes.IfMode=1,wirebreakmonitoring
(ifany)willbedisabled,forexample.IfMode=0,itwillbeenabledinstead
(default).
Inthecaseoflinearencoders,PeriodLenandDigitalResolutionwillbe
neededinsteadofMultiTandSingleT.
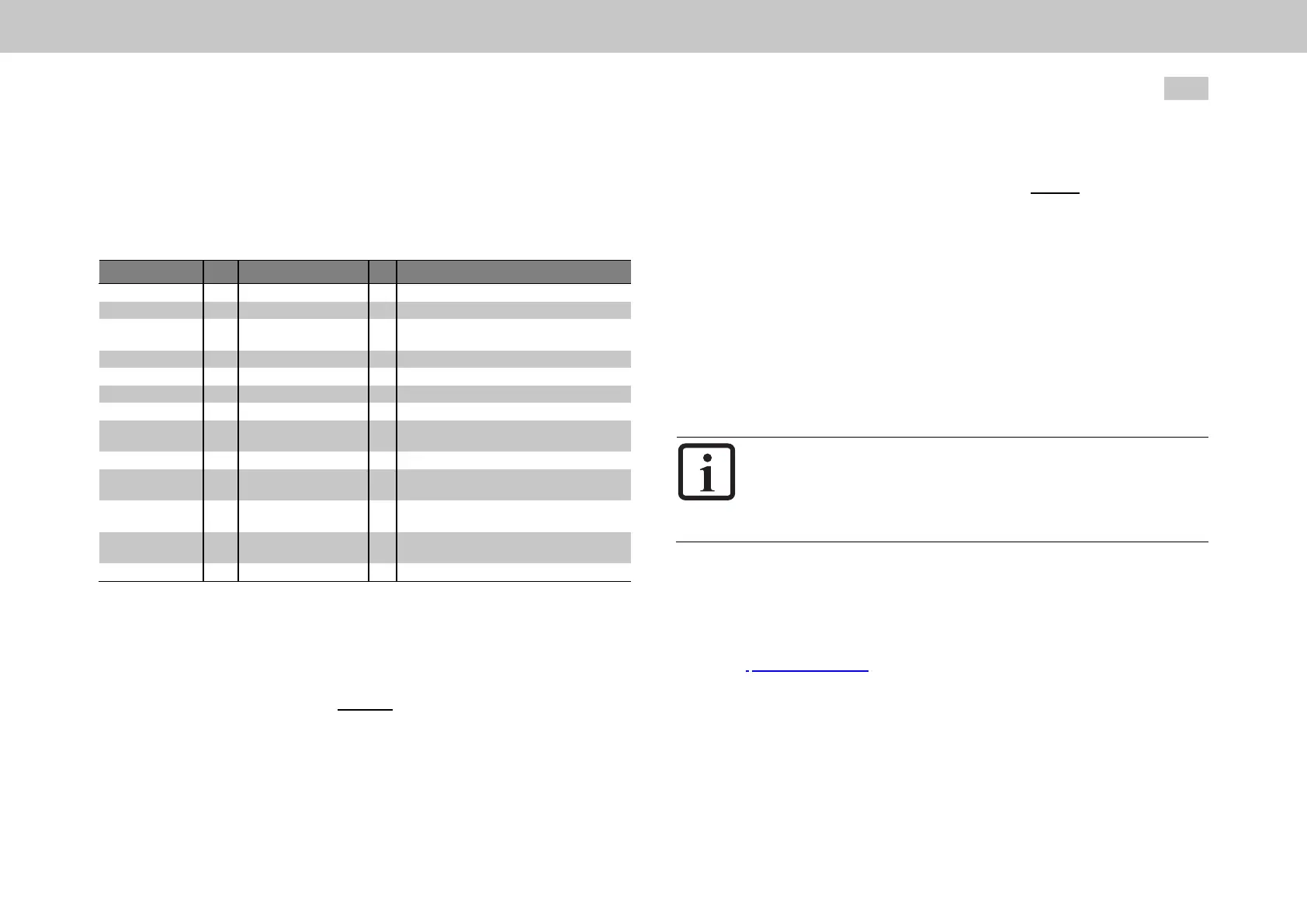
P No. Index Name / Setting Unit Description
505 0 ENC_CH1_Sel MainselectiononencoderchannelCh1
540 0 ENC_CH1_Abs Absolutevalueinterfaceforone-timereading
542 0 ENC_CH1_lines NumberofanalogSin/Coslinesperrevolution
(TTLlinesaswell).
543 0 ENC_CH1_MultiT Numberofmulti-turnbitsforthedigitalinterface
544 0 ENC_CH1_SingleT Numberofsingle-turnbitsforthedigitalinterface
545 0 ENC_CH1_Code Codeselection(forSSIencoders)(binary,Gray)
546 0 ENC_CH1_Mode Modeselection(forSSIencoders)
547 0 ENC_CH1_MTBase Definitionofpointofdiscontinuityinmulti-turn
range
548 0 ENC_CH1_MTEnable EnableMultiTurnuse(negativelogic,1=MToff)
551 0 ENC_CH1_EncObsMin ComparisonvalueforSin/Coswirebreak
monitoring
553 0 ENC_CH1_PeriodLen nm Linearencoders:LengthofananalogSin/Cos
segmentinnm(nanometres)
554 0 ENC_CH1_
DigitalResolution
nm Linearencoders:Lengthofadigitalincrementin
nm(nanometres)
616 0 ENC_CH1_CycleCount Samplingcyclein:nx125μ(microseconds)
Table 6.6: Main parameters for encoder channel Ch1
MTBase, when used with its default setting, will ensure that the absolute value
initialization “starts up with plus-minus”: I.e. the encoder’s multi-turn value range
from 0 to max will be mapped to -1/2max to +1/2max; the second half of the
measuring range will be initialized as negative; in this case, the point of discontinuity
will be found at 1/2max. --- this can be changed with MTBase! --- When MTBase=0,
the absolute value initialization will, for example, “start up with zero to max”: I.e. the
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
58
6 Encoder
encoder’s multi-turn value range from 0 to max will be mapped to 0 to max; the
second half of the measuring range will be initialized as positive; in this case, the
point of discontinuity will be found at 0.
If you set MTEnableto1, you can use an available multi-turn encoder as a single-
turn encoder (this is only needed for testing purposes).
If you set EncObsMinto0, Sin/Cos wire break monitoring will be disabled. The
default value is 0.2 (20 %) and stands for a calculated amplitude value (calculated
using the two Sin/Cos signals) of x = sqrt(a^2 + b^2). If the Sin/Cos signals are equal
to approx. 1 Vss in comparison, approx. 0.8 will be calculated here (approx. 80 %
magnitude at the A-D converters; approx. 0.25 Vss Sin/Cos will yield approx. 0.2
here (20 % magnitude at the A-D converter)). The error threshold can be set with
EncObsMin within a broad range.
NOTE
AstherearevariousprotocolmodesavailableforSSIencoders
(with/withoutwirebreakmonitoring,with/withoutparitybit,etc.),
consultwithyourprojectsupervisorortheHelplineMoogbefore
usinganyspecialSSIprotocolmodes.
6.5.2EnDat(cyclical)X7
Ch1: ENDAT(4) - Cyclical EnDat (2.1 or 2.2)
EnDat is a digital encoder interface developed by HEIDENHAIN. For more details,
please visit www.heidenhain.de and go to ►Dokumentation ►Fundamentals
►
Interfaces ►EnDat2.2
The software versions required to run the EnDat encoder interface are the standard
software versions for the MSD Servo Drive and MSDSingle-Axis Servo Drive
Compact.

 Loading...
Loading...