MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
138
7 Control
7.6Synchronousmotorfield-weakening
Up to rated speed the asynchronous motor runs with a full magnetic field and so is
able to develop a high torque. Above the rated speed, the magnetic field is reduced
because the maximum output voltage of the Servo controller has been reached. The
motor is operated in the field-weakening range at reduced torque.
To use field weakening for asynchronous motors, the motor parameters must be
known very accurately. This applies in particular to the dependency of the main
inductance on the magnetizing current. The field-weakening mode requires that a
motor identification and an optimization in the basic setting range be carried out. In
the process, default values for the control circuits and the "magnetic operating point"
are set based on the rated motor data and the magnetizing current presetting in
P340[0] - CON_FM_Imag. For field weakening when using an asynchronous motor,
a characteristic curve is always internally calculated (independently of P435[0]-
CON_FM_FWMode) and a voltage controller is superimposed.
Configuring the characteristic curve with P341[0]-ImagSLim:
Variant1:P 341[0] ≠ 0signifiesselectionofthe1/ncharacteristic(default)
Variant2:P 341[0] = 0signifiesselectionofthemodified1/ncharacteristic
isd=f(n).
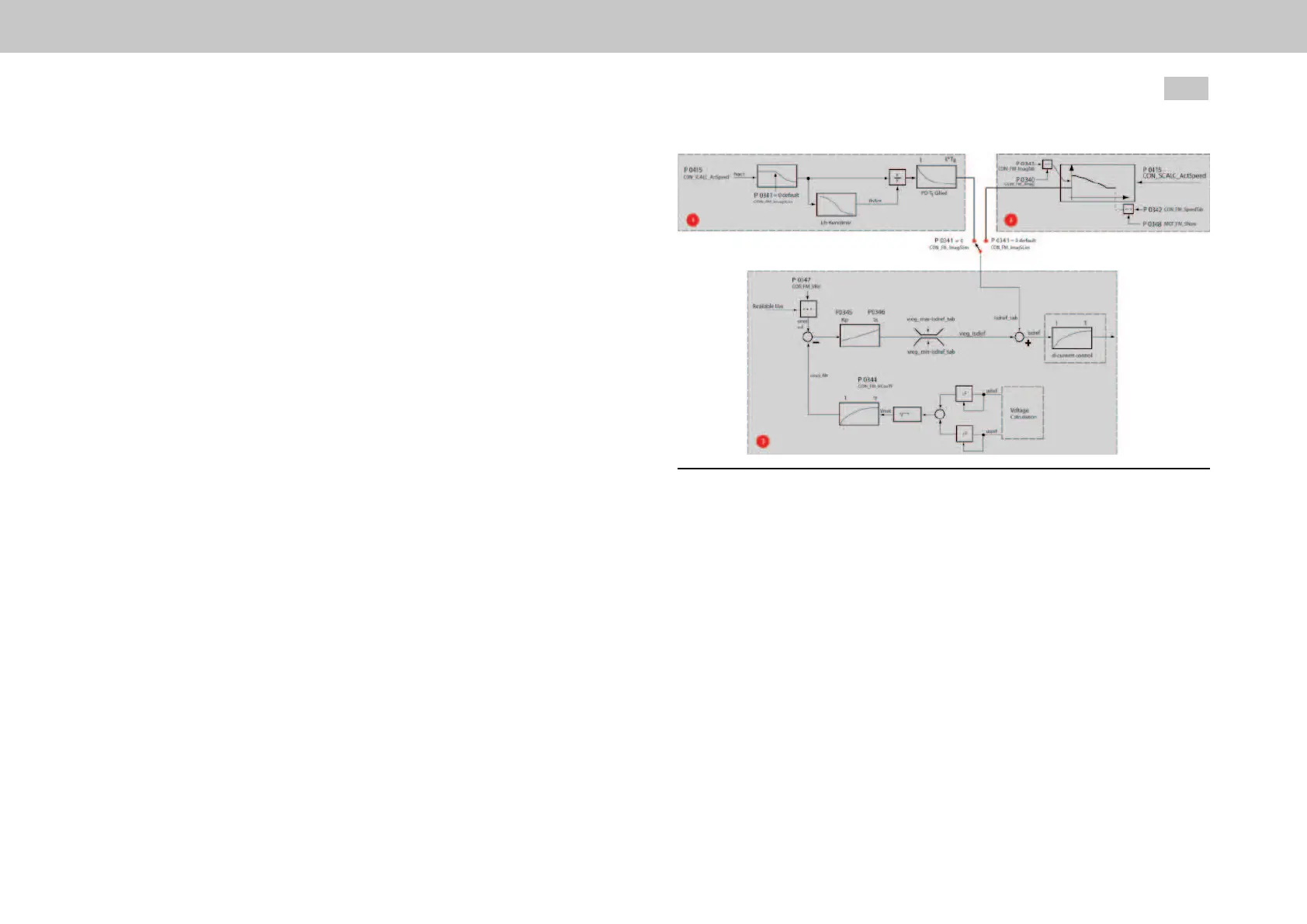
Fig. 7.32: Structure of field-weakening of asynchronous motors
7.6.1Variant1:Default
Combination of "pre-control via 1/n characteristic" + voltage controller. The motor
identification sets the voltage controller so that the voltage supply in a weakened
field is adequate. If the Servo controller is at the voltage limit, it reduces the d-current
and thus the rotor flux. The 1/n characteristic curve is calculated with operating
speed SNom * ImagSLim.
As the Servo controller has only limited dynamism, and starts to oscillate if larger
gain factors are set, it is possible to use variant 2.

 Loading...
Loading...