MOOG
ID No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
137
7 Control
Fig. 7.30: “Position control” dialog box
ID Index Name Unit Description
386 CON_SCON_TFric
386 0 CON_SCON_TFric %
386 1 %
Dryfrictioncomp.,normalizedtomotorrated
torque
Frictiontorquecompensationsettings
Thetablevalues0to2arealwaysapplicable
whiletablevalues3to4onlytakeeffectinthe
accelerationrange.
Compensationvalue1
386 2 %
386 3 %
386 4
CON_SCON_TFric
CON_SCON_TFric
CON_SCON_TFric
CON_SCON_TFric %
387
Compensationvalue2
Compensationvalue3
Compensationvalue4
Compensationvalue5
387 0 rpm
387 1 rpm
387 2 rpm
387 3 rpm
Frictiontorquecompensation:Speedlimits
Frictiontorquecompensation:Speedlimit1
Frictiontorquecompensation:Speedlimit2
Frictiontorquecompensation:Speedlimit3
387 4 rpm
388 0
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TConst % Frictiontorquecompensation:Constant
(independentofdirection)
Table 7.20: “Position controller - Feed-forward control” parameters (friction torque
compensation extract)
The screen view can only be used to configure P386[0] - CON_SCON_TFric. In
order to access all the friction torque compensation parameters, please switch to the
list view by using the “CTRL + L” key combination.
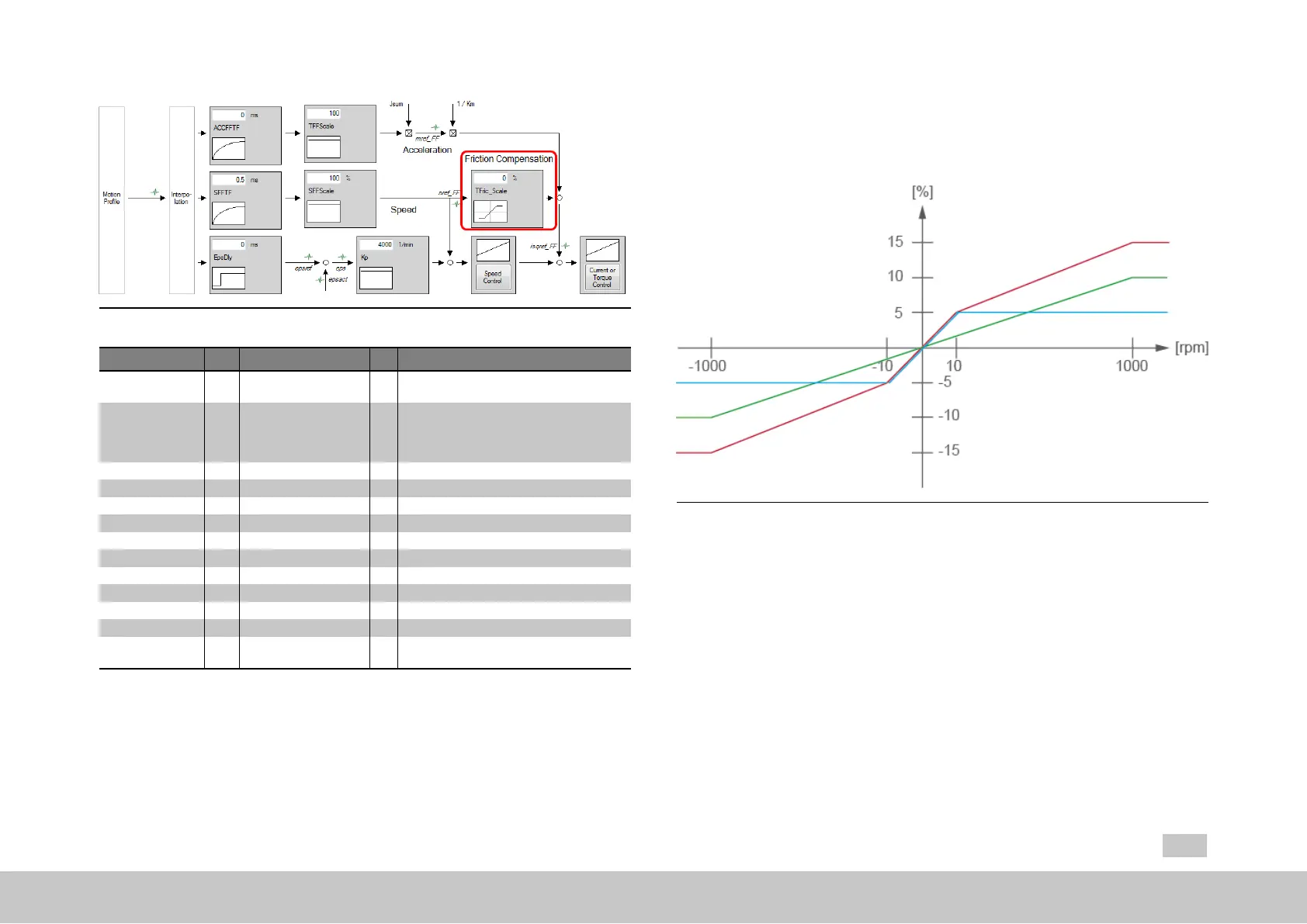
Fig. 7.31: Friction torque compensation for position control
The friction torque compensation is derived from the forward-fed speed nref_FF. It
has five basic functions, each having the Torque and Speed parameters. The basic
function runs proportionally up to the point (Speed, Torque), the function value
remains constant at higher speeds.

 Loading...
Loading...