MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
136
7 Control
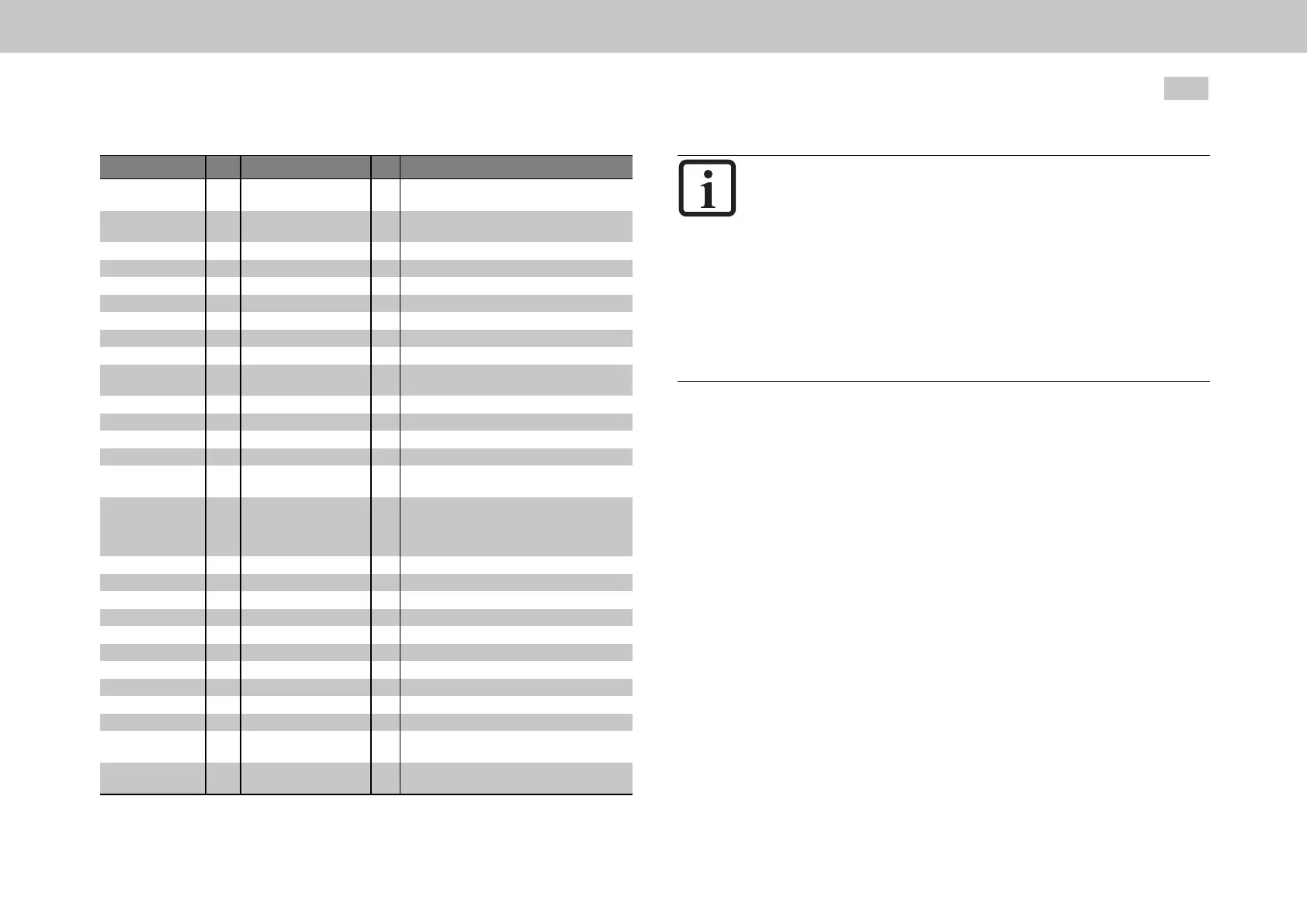
ID Index Name Unit Description
372 0 CON_IP_SFFTF ms
374 0 CON_IP_EpsDly ms
375 0 %
376
376 0
376 1
377
Speedfeedforwardfiltertimeconstant(PCON
mode)
Delaypos.referencebyintegerno.ofcycles
CON_PConTS
Scalingofspeedfeedforward
Scalingoftorquefeedforward
Scalingoftorquefeedforward(PCONmode)
Scalingoftorquefeedforward(SCONmode)
Enablefeedforward
377 0
377 1
378 0
CON_IP_SFFScale
CON_IP_TFFScale
TFFScale_PCON
TFFScale_SCON
CON_IP_EnableFF
CON_IP_EnableFF
CON_IP_EnableFF
CON_IP_ACCFFTF ms
379 CON_IP_FFMode
379 0 PosHighRes
379 1 Speed
379 2 Torque
386 CON_SCON_TFric
386 0 CON_SCON_TFric %
386 1 %
Accelerationfeedforwardfiltertimeconstant
(PCON,SCONmode)
Feed-forwardcalculationmode
Positionhighresolution
Speedpre-control
Torquepre-control
Dryfrictioncomp.,normalizedtomotorrated
torque
Frictiontorquecompensationsettings
Thetablevalues0to2arealwaysapplicable
whiletablevalues3to4onlytakeeffectinthe
accelerationrange.
Compensationvalue1
386 2 %
386 3 %
386 4
CON_SCON_TFric
CON_SCON_TFric
CON_SCON_TFric
CON_SCON_TFric %
387
Compensationvalue2
Compensationvalue3
Compensationvalue4
Compensationvalue5
387 0 rpm
387 1 rpm
387 2 rpm
387 3 rpm
Frictiontorquecompensation:Speedlimits
Frictiontorquecompensation:Speedlimit1
Frictiontorquecompensation:Speedlimit2
Frictiontorquecompensation:Speedlimit3
387 4 rpm
388 0
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TFricSpeed
CON_SCON_TConst %
1516 0 SCD_Jsum kg
m*m
Frictiontorquecompensation:Constant
(independentofdirection)
Totalinertiaofmotorandplant
Table 7.19: “Position controller - Pre-control” parameters
NOTE
Torquefeed-forwardcontrolwillbedisablediflinearinterpolation
isused.
TheoverallmomentofinertiainP 1516[0] - SCD_Jsummustnot
bechangedtooptimizethepre-control,becausethiswouldalso
haveaneffectonothercontrollersettings!
Inmulti-axisapplicationsrequiringprecisethree-dimensionalaxis
coordination,suchasinthecaseofmachinetools,thedelayof
thepositionsignalmustbeequallysetonallaxesviaP 374[0] -
IP_EpsDly.Otherwisethesynchronizationoftheaxesmaysuffer,
leadingtothree-dimensionalpatherrors.
7.5.2Frictiontorquecompensation(friction)
Two types of friction influence the variables of the position tracking error:
Dryfriction(grip),whichactsdependingonthedirectionofmotion,but
independentlyofthespeed’smagnitude.
Fluidfriction(viscosity),whichactsproportionallytospeed.
Friction torque compensation can be used for both types of friction. Both types of
friction are described in the compensation table by a function starting from speed = 0
or force = 0 up to a defined speed or force. Above the specified limit, the speed or
force remains constant. Compensation is performed as a percentage of rated motor
torque and power.

 Loading...
Loading...