9.5.1Functionselectors
ID Index Name / Setting Unit Description
129,130 0 MPRO_OUTPUT_FS_
OEAxx
Functionselectorsforanalogoutputs
OFF(0) Nofunction
NACT(1) Actualspeed
TACT(2) Actualtorque/force
IRMS(3) Effectivecurrent
PARA(4) Valueofparameter134[0]
ACTPOS(5) Positionactualvalue
VDC(6) DClinkvoltage
ACTPOS_MODULO(7) Actualmoduloposition
ACT_POWER(8) Power
APP_POWER(9) Apparentpower
Table 9.14: “Analog outputs” function selectors
NOTE
Forafulldescriptionoftheanalogoutputsinthe"CANopen+2AO"
communicationoption(technicaldata,connections,
configuration),seethe"CANopen+2analogoutputs
Specification"(IDNo.:CA79904-001).
Thetechnologyoption“CANopen+2AO”isnotavailablefor
MSDSingle-AxisServoDriveCompact.
TodeterminewhetheryourMSDServoDrivecomeswiththe
"CANopen+2AO"technologyoption,youcancheckthe electronic
ratingplate(see Section"Electronicratingplate"on page294).
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
248
9 Input/Output settings
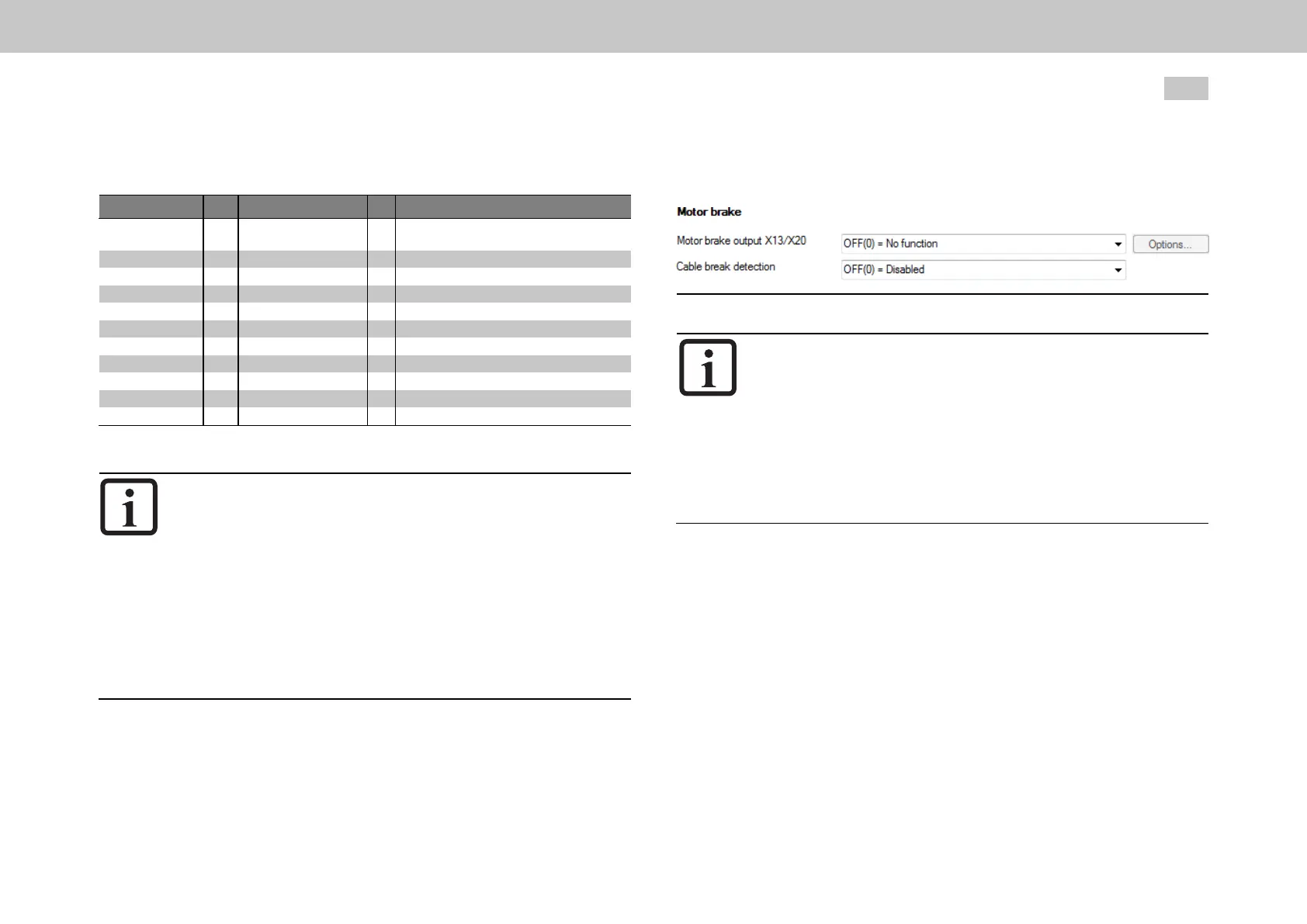
9.6Motorbrakeoutput
Fig. 9.11: “Motor brake settings” dialog box
NOTE
OntheMSDSingle-AxisServoDriveCompact,themotorbrake
outputforframesizes2to5willbefoundonconnectorX13.
OntheMSDServoDrive(Single-AxisSystemandMulti-Axis
System),themotorbrakeoutput...
o
forframesizes1to4willbefoundonconnectorX13
o
forframesizes5to6awillbefoundonconnectorX20
o
forframesize7willbefoundonconnectorX44
An optional holding brake built-in to motor provides protection against unwanted
motion when the power is cut and in case of error. If the brake is mounted on the axis
mechanism and not directly on the shaft, note that undesirably severe torsional
forces may occur on sudden engagement of the brake.
The P125[0] - MPRO_OUTPUT_FS_MOTOR_BRAKE function selector can be
used to select any function (similar to those for the digital outputs) for the motor
brake output. However, the special motor brake control section hardware will be
used for the selected function.
However, when using a motor brake with P125[0] - MPRO_OUTPUT_FS_
MOTOR_BRAKE = BRAKE(2), the criteria for braking need to be defined. This
criteria can consist of a variety of states, limits, threshold values, input signals, and
fieldbus commands.

 Loading...
Loading...