x
x
x
4p
2πf
s
i
Sd,ref
L
s
-L
s
i
Sq,ref
u
Sd,mot
u
Sq,mot
C
f
-C
f
x
i
Sd,pre
i
Sq,pre
to current controller
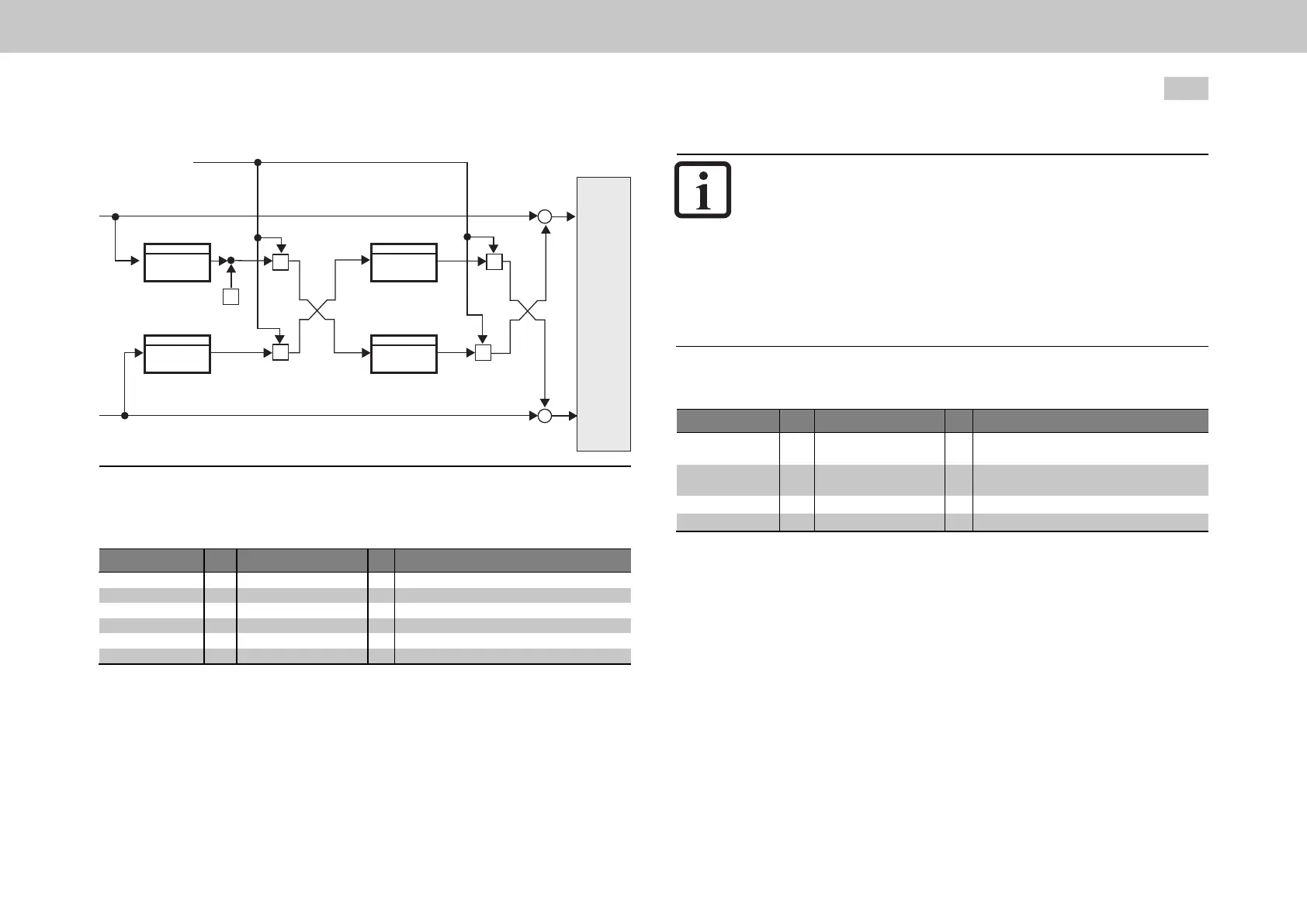
Fig. 5.17: Diagram of additive current setpoint calculation for sine wave filters
5.7.3Parameters
ID Index Name Unit Description
462 0 MOT_FluxNom Vs
471 0 MOT_Lsig mH
2900 0 MOT_Filt_Sel Motorfilter:Selector
2901 MOT_Filt_Para Motorfilter:Settings
2901 0 L_Filt mH Motorfilter:Chokeorfilterinductance
2901 1 C_Filt nF Motorfilter:Capacitance(deltaconfiguration)
Table 5.9: “Motor filter” parameters
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
48
5 Motor
NOTE
FiltercapacitanceP 2901[1] - C_Filtisspecifiedasthe
capacitancevalueforthecapacitorswhenusingadelta
configuration!Inordertocalculatethecapacitanceperphaseas
perthecircuitdiagramabove,thedevicewillinternallymultiply
thevalueby3(delta-wyetransform).Ifthecapacitorsare
connectedinawyeconfiguration,orifthecapacitanceofthe
single-phaseequivalentcircuitisknown,thecorresponding
capacitancevaluemustfirstbedividedby3andthenenteredinto
theparameter.
5.7.4Scopesignals
ID Index Name Unit Description
2500 0 isdpre_SinFilt A Calculatedfiltercapacitorcurrentdcomponents
(isd
Cf
intheformulaabove)
2501 0 isqpre_SinFilt A Calculatedfiltercapacitorcurrentqcomponents
(isq
Cf
intheformulaabove)
2502 0 usdmot_SinFilt V Calculatedmotorterminalvoltagedcomponents
2503 0 usqmot_SinFilt V Calculatedmotorterminalvoltageqcomponents
Table 5.10: “Motor filter” scope signals

 Loading...
Loading...