NOTE
Parameterizationiscarriedoutintheselecteduserunitforthe
positionasintegervalues.Itisadvisabletousethesamenumber
ofcorrectioninterpolationpointsforthepositiveandnegative
directions.Thefirstandlastcorrectionvaluesinthetablemustbe
zeroinordertoavoidinstability(stepchanges)oftheactual
positionvalue.Differingcorrectionvaluesforthepositiveand
negativedirectionsatthesameinterpolationpointwillleadto
instabilityintheassociatedactualpositionvaluewhenthe
directionisreversed,andsopossiblytoastepresponse
adjustmenttothereferenceposition.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
100
6 Encoder
6.11Oversampling
Encoder signal oversampling optimizes the accuracy of resolver and Sin/Cos
signals. This function can only be used, if necessary, for low-track Sin/Cos encoders
and resolvers; using it for high-track Sin/Cos encoders is
not
permitted.
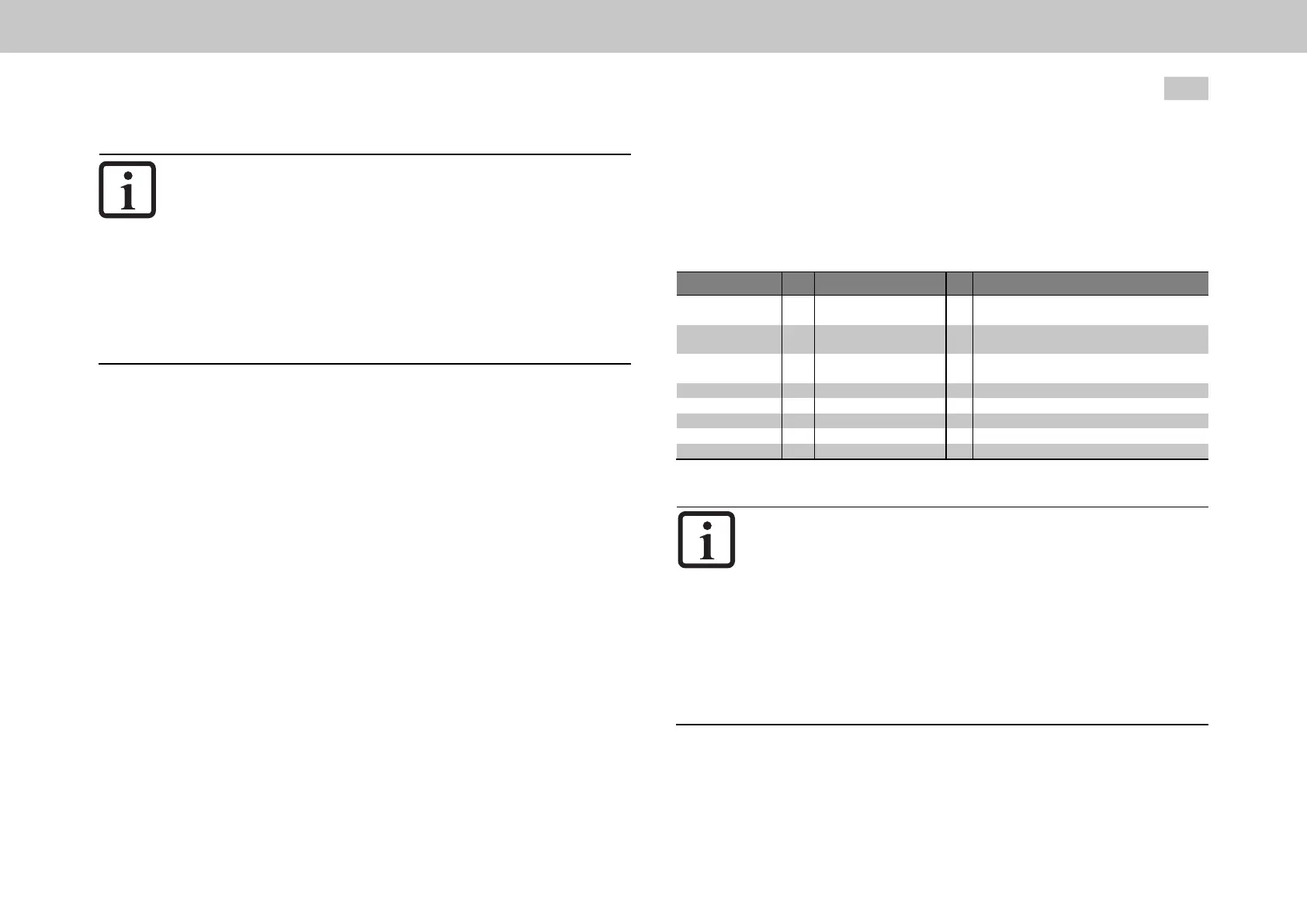
ID Index Name Unit Description
1956 CON_ACT_Ovrs Encodersignaloversampling.Thisfunction
appliesonlytoresolverandSin/Cossignals
1956 0 active Switchforactivatinganddeactivatingthe
function
1956 1 pmeas Thepercentagemeasuringtimeforoversampling
dependentonthesamplingtime.
1956 2 filtershift Limitfrequencyfortheoversamplingfilter
1956 3 sourceselect Signalsourceforoversampling
1957 CON_ACT_Ovrs_Tracks Oversampledtracksignals
1957 0 Track_a
1957 1 Track_b
Table 6.36: Oversampling parameters
NOTE
Whenoversamplingisenabled,insteadofthenormalA/Dsignals
theoversampledsignalsfortheencoderspecifiedinparameter
P 1956[3] - sourceselectareused.Inthecaseofhigh-track
Sin/Cosencodersinparticular,thelowlimitfrequencyofthe
oversamplingfiltersmayresultinquadranterrors.Ifthe
oversamplingunitsareused,itmustalwaysbecertainthatthe
encoderdoesnotdramaticallyexceedthespecifiedlimit
frequencies.
Beforeusingoversampling,consultwithyourprojectsupervisoror
theMoogHelpline.

 Loading...
Loading...