P No. Index Name / Setting Unit Description
Splinell(3) Cubicsplineinterpolation:
MustbeexplicitlyrequestedfromMoog
NonIPSpline(4) Cubicsplineapproximation:
Inthismethod,thenodesareapproximatedby
meansofB-splines.Thetrajectorynormally
doesnotrunexactlythroughthepoints
specifiedbythecontrol.Thedeviationis
normallynegligiblysmall.Intheinterpolation
pointsthetransitionsarecontinuouswithregard
toacceleration,whichbecomesapparentby
minor"noise".Instartandtargetpositionthe
interpolationpointsalwaysmatchthe
trajectory.
Application:Minimizingnoise,smoother
motion,restrictionsoncontouring
Cos(5) Cosineinterpolation:
Theinterpolationformulacorrespondstoa
Fourierexpansionoftheunknowninterpolants.
Table 8.18: Interpolation types MSD Servo Drive (continue)
When using NonIpSpline, superimposed external feed-forward control can be used.
The controller must write the feed-forward control values to the corresponding
reserved parameters in the relevant bus system. All decelerations should be
disabled in the controller.
P375[0] - CON_IP_SFFScale and P376 - CON_IP_TFFScale must be used to
perform the scaling required for the internal units. The result can be viewed in the
scope by using scope variables 101 - nref_EXT and 102 - mref_EXT. If the scaling
appears to be OK, use P379 - CON_IP_FFMode to switch to the external feed-
forward control.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
187
8 Motion profile
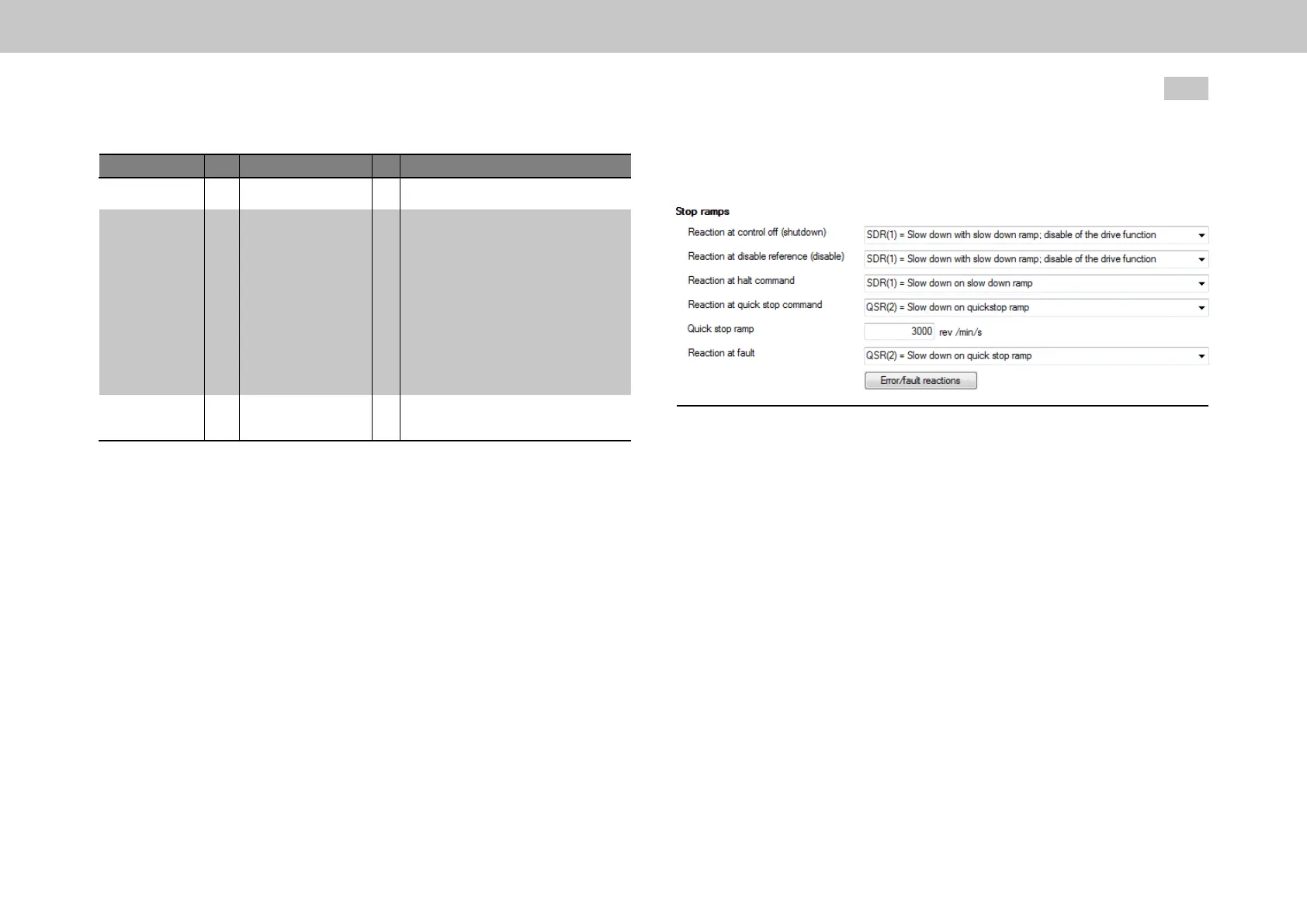
8.4Stopramps
Fig. 8.37: “Stop ramps” screen
Each reference source has its own acceleration and braking ramps. There are also
the stop ramps (quick-stop ramp), according to the CiA 402 standard. The ramp
functions are only effective in certain system states. The required settings can be
selected from the dialog box. Clicking the "Error/Error reactions" button directly
accesses the dialog box for the error reactions.
Stop ramps in torque control
When in torque control mode (TCON), if one of the following occurs:
Thecontrolisshutdown
Thesetpointisdisabled
Stop
Quickstop
Error
the set ramps will be performed in rpm.

 Loading...
Loading...