Pulse output instructions
1178
Part IV Tool Instructions
Input variable Data type Function
bExecute A rising edge activates the function block
bReverse
BOOL
Movement direction: Forward = FALSE, Reverse = TRUE
diInitialSpeed
diTargetSpeed
Initial speed/Target speed: Set this value according to the
frequency range selected in
PulseOutput_Channel_Configuration_DUT:
FP
, FP-X: 1 to 9800 (1.5Hz–9.8kHz)
48 to 100000 (48Hz–100kHz)
191 to 100000 (191–100kHz)
FP0R: 1 to 50000 (1Hz–50kHz)
FP0, FP-e: 40 to 5000 (40Hz–5kHz)
diAccelerationTime
Acceleration/deceleration time (FP
, FP-X):
With 30 steps: 30ms–32760ms (specify in steps of 30)
With 60 steps: 60ms–32760ms (specify in steps of 60)
Acceleration/deceleration time (FP0, FP-e): 30ms–32760ms
Acceleration time (FP0R): 1ms–32760ms
diDecelerationTime Deceleration time (FP0R): 1ms–32760ms
diCreepSpeed
DINT
Creep speed (FP0R): 1 to 50000 (1Hz–50kHz)
dutChannelConfiguration Predefined system DUT for channel configuration:
PulseOutput_Channel_Configuration_DUT
Output variable Data type Function
bError BOOL Refers to an internal mismatch of input values to avoid a PLC
error.
Data types
Example
In this example the function has been programmed in ladder diagram (LD). Please refer to the
online help for a structured text (ST) example. The same POU header is used for all programming
languages.
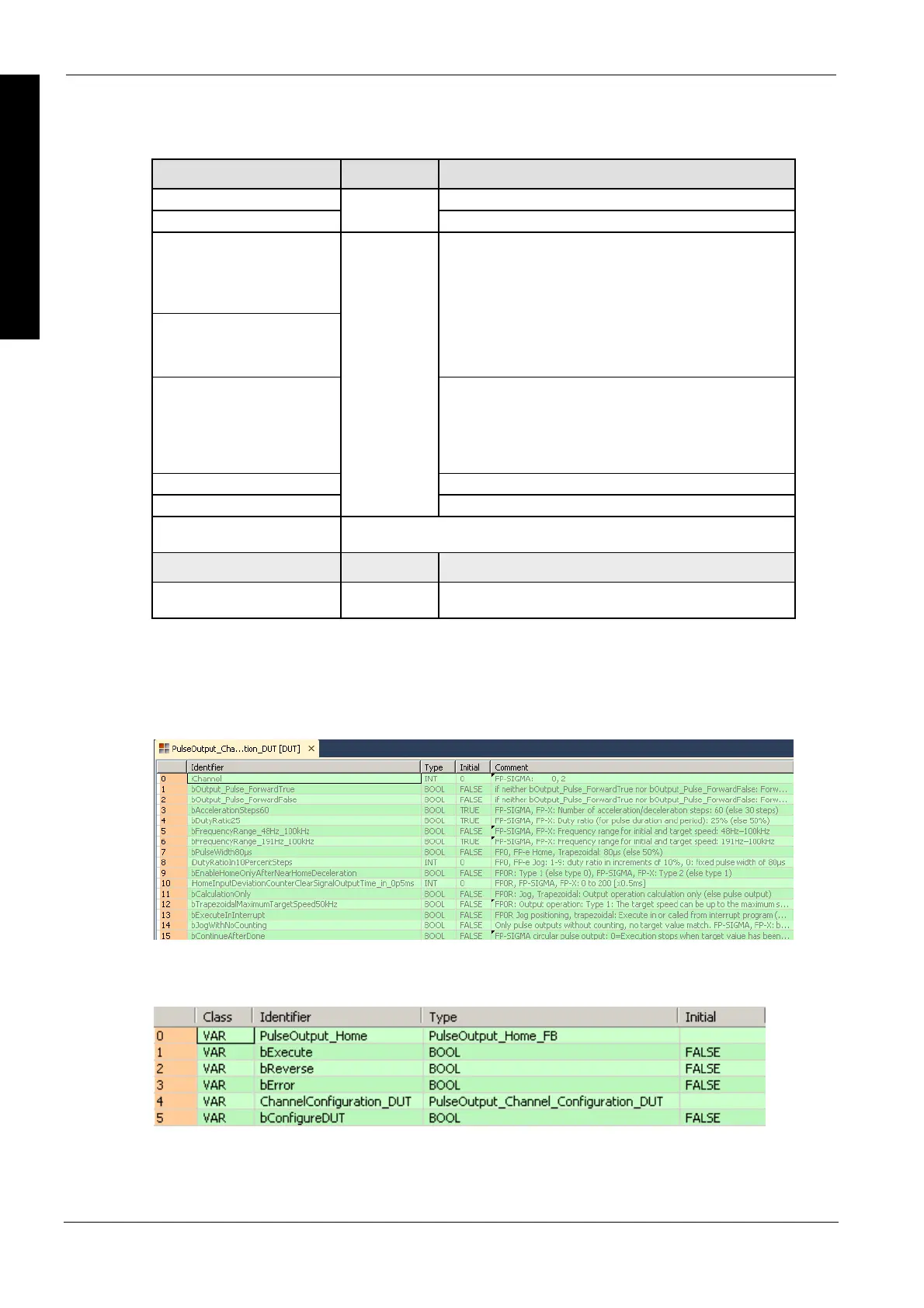
DUT
Use the following predefined DUT: PulseOutput_Channel_Configuration_DUT
POU header
All input and output variables used for programming this function have been declared in the POU
header.

 Loading...
Loading...






