Process control instructions
938
Part III FP Instructions
30.1 Explanation of the operation of the PID instuctions
+
-
A/D
A/D
D/A
e
F355_PID
(Kp, Ti, Td, Ts)
parameter
Control
input
set
value
(SP)
output
value (MV)
output
quantity
analogue
section
measurement value (PV)
POU body
PID
calculation
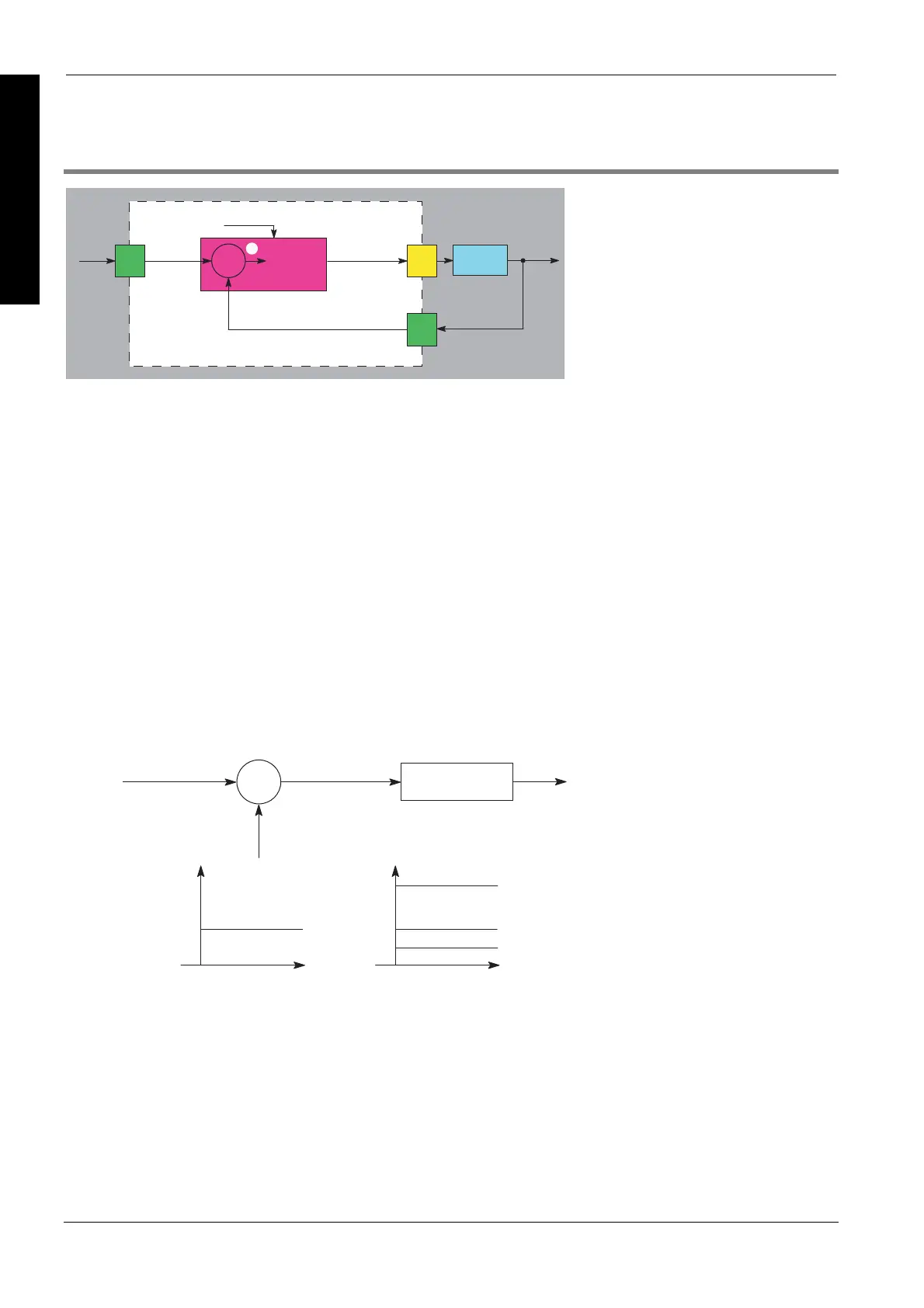
The above POU body represents the standard control loop. The control input is determined by the user (e.g.
desired room temperature of 22°C). After the A/D conversion the set point value (SP) is entered as the input
value for the PID processing instruction. The measured process value (PV) (e.g. current room temperature) is
normally transmitted via a sensor and entered as the input value for the PID processor. F355_PID calculates the
standard tolerance e from the set point value and the process value (e = set value - measured value). With the
parameters given (proportional gain Kp, integral time Ti, ...) a new output value (MV) is calculated in increments
set by the sampling time Ts. This result is then applied to the actuator (e.g. a fan that regulates room
temperature) after the D/A conversion. The analog section represents the system’s actuator, e.g. heater and
temperature regulation of a room.
A PID operation consists of three components:
1. Proportional part (P part)
A proportional part generates an output that is proportional to the input. The proportional gain Kp determines by
how much the input value is increased or decreased.
A proportional part can be a simple electric resistor or a linear amplifier, for example.
The P part displays a relatively large maximum overshot, a long settling time and a constant standard
tolerance.
+
-
1
0
t
e
1
0.5
2
Kp=1
Kp=0.5
Kp=2
0
t
MVp
Set value (SP)
Standard
tolerance e
Measurement
signal (PV)
Output (MVp)
Proportional
gain (Kp)
2. Integral part (I part)

 Loading...
Loading...







