Process control instructions
954
Part III FP Instructions
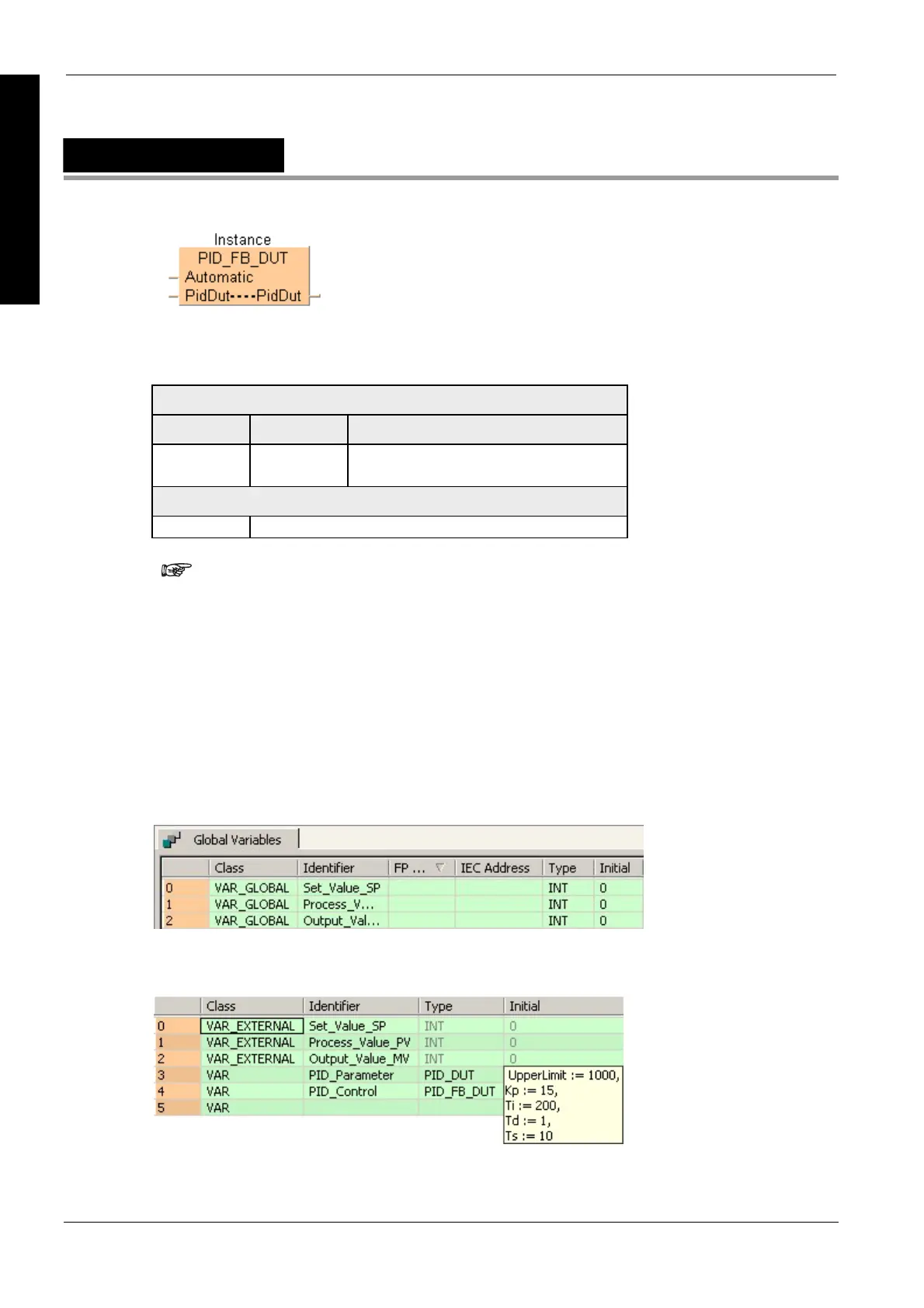
PID_FB_DUT
PID processing instruction
This structure defined in System Libraries / FP Library / DUTs contains the following parameters
(for details, please refer to the DUT PID_DUT):
Input variables (VAR_INPUT):
Variable Data type Function
Automatic BOOL FALSE: Manual setting of MV possible
TRUE: Automatic PID controlled MV
Input/Output variable (VAR_IN_OUT):
PidDut PID_DUT
You may not enter the DUT PID_DUT a second time under DUTs of the
current project.
The value for MV can be assigned externally either when the program is
initialized or when the value of Automatic is FALSE.
In order to achieve maximum resolution and minimum dead time beyond
LowerLimit and UpperLimit, these values should, if possible, cover the
entire range of 0–10000.
Description
This implementation allows you to access the F355_PID instruction via the structure PID_DUT.
Data types
Example
In this example the function has been programmed in ladder diagram (LD) and structured text (ST).
GVL
In the global variable list all global input and output values are declared that are used to program
the function. The addresses are depending on the respective PLC-Type.
POU header
All input and output variables used for programming this function have been declared in the POU
header.

 Loading...
Loading...







