Process control instructions
966
Part III FP Instructions
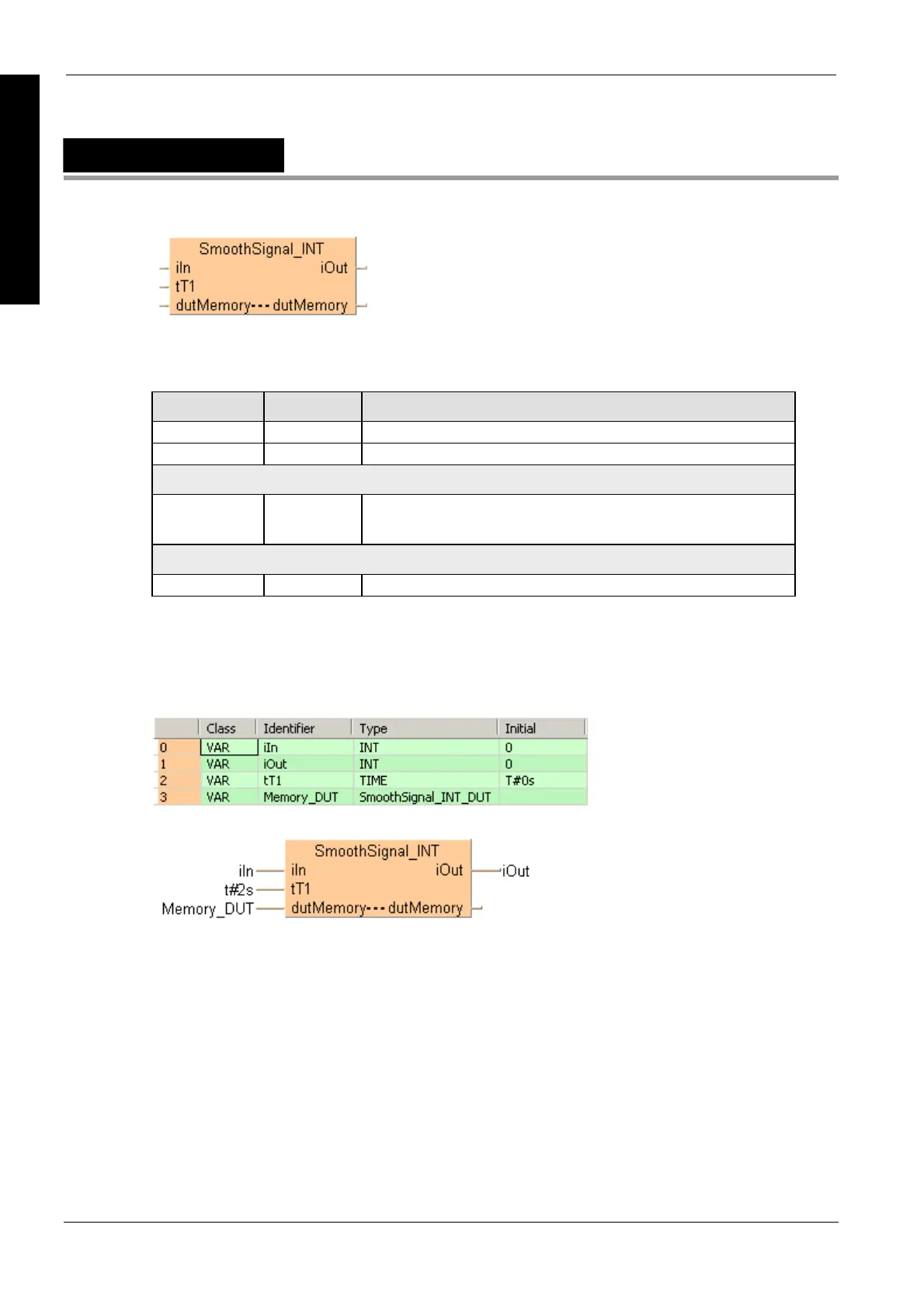
SmoothSignal_INT
Smooth INT signals
PLC types see page 1330
Input variable Data type Function
iIn INT Input signal
tT1 TIME Time constant of the 1st order low-pass filter
Input/output variable
dutMemory dutMemory Instance-dependent data memory structure, which serves as the internal
memory of the function. As with the instance name of a function block, it
may be neither initialized nor written in the body!
Output variable
iOut INT Output signal
Description
This instructions uses a 1st order delay time tT1 to smooth the INTEGER input value at iIN.
Data types
Example
In this example the function has been programmed in ladder diagram (LD) and structured text (ST).
The same POU header is used for all programming languages.
POU header
All input and output variables used for programming this function have been declared in the POU
header.
LD
ST
When programming with structured text, enter the following:
SmoothSignal_INT(iIn := iIn,
tT1 := t#2s,
dutMemory := Memory_DUT,
iOut => iOut);

 Loading...
Loading...







