Process control instructions
942
Part III FP Instructions
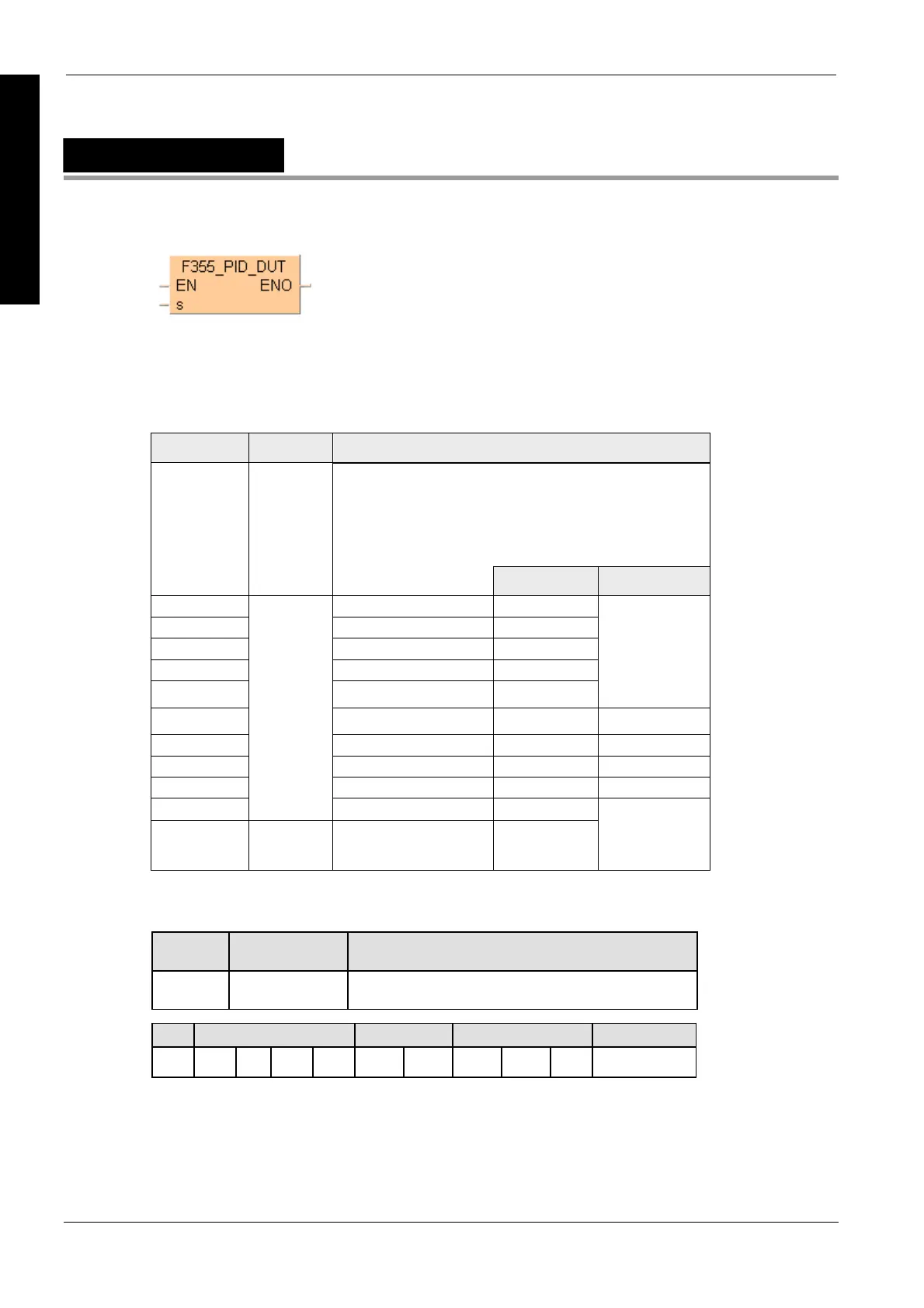
F355_PID_DUT
PID processing instruction
The function calculates a PID algorithm whose parameters are determined in a data table in the
form of an ARRAY with 30 elements that is entered at input s.
The required data table PID_DUT_31 contains the following parameters (for details, please refer to
the DUT PID_DUT_31 in the online help):
Parameter Data type Function
Control mode
16#X000 Inverse PI-D control
16#X001 Forward PI-D control
16#X002 Inverse I-PD control
16#X003 Forward I-PD control
Control WORD
Range Unit
SP Set point value 0-10000
PV Process value 0-10000
MV Manipulated value 0-10000
LowerLimit MV lower limit 0-10000
UpperLimit MV upper limit 1-10000
Kp Proportional gain 1-9999 0.1
Ti Integral time 1-30000 0.1s
Td Derivative time 1-10000 0.1s
Ts Sampling time 1-6000 0.01s
AT_Progress
INT
Auto-tuning progress 0-5
Dummies ARRAY
[11..30] OF
WORD
are utilized internally by
the PID controller
PLC types Availability of F355_PID_DUT (see page 1325)
Variable Data type Function
s PID_DUT_31 Detailed explanation of parameters
For Relay T/C Register Constant
s - - WR WL SV EV DT LD FL -
Description
The PID processing instruction is used to regulate a process (e.g. a heater) given a measured
value (e.g. temperature) and a predetermined output value (e.g. 20°C).
Data types
Operands

 Loading...
Loading...







