Process control instructions
940
Part III FP Instructions
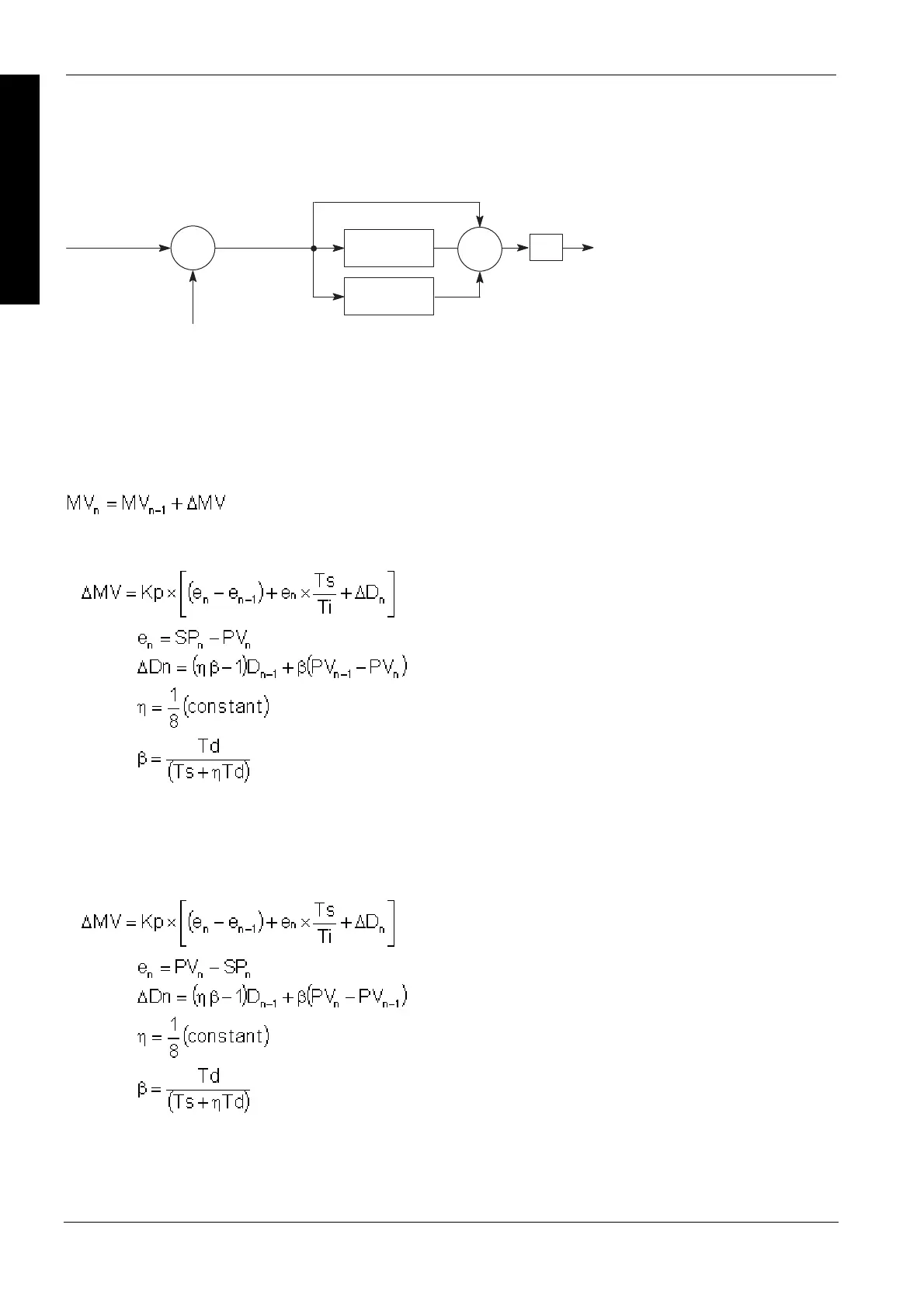
A PID controller is a combination of a P component, an I component and a D component. When the parameters
Kp, Ti and Td are optimally adjusted, a PID controller can quickly control and maintain a quantity at a
predetermined set value.
+
-
+
+
+
Kp
Set value (SP)
Standard
tolerance e
Measurement signal (PV)
Integral
operation
Derivative
operation
Output (MV)
Reference equations for calculating the controller output MV
The following equations are used to calculate the controller output MV under the following conditions:
In general:
The output value at time period n is calculated from the previous output value (n-1) and the change in the output
value in this time interval.
Reverse operation PI-D Control = 16#X000
Forward operation PI-D Control = 16#X001

 Loading...
Loading...






