7–26 Altera Corporation
Stratix Device Handbook, Volume 2 September 2004
Finite Impulse Response (FIR) Filters
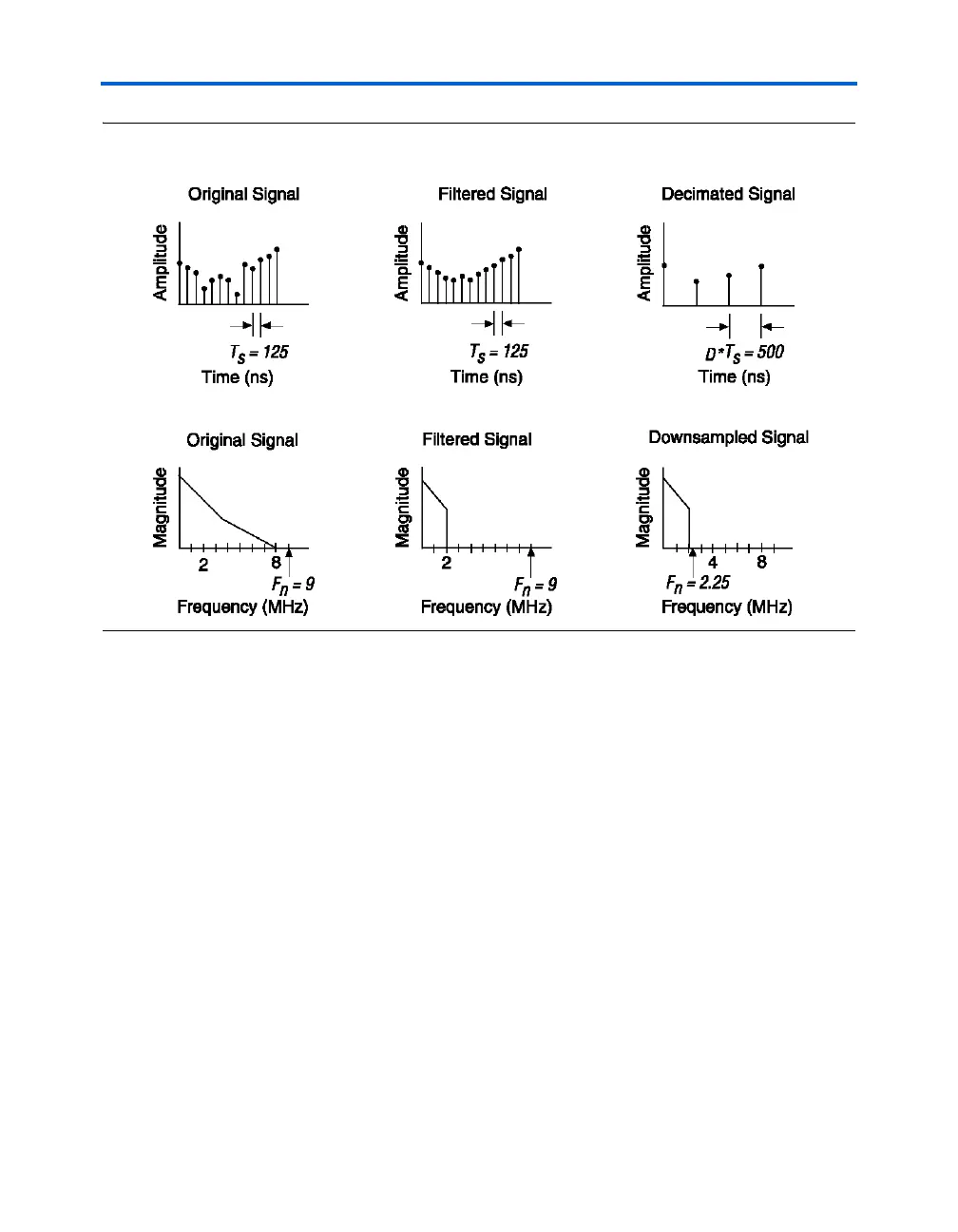
Figure 7–15. Time & Frequency Domain Representations of Decimation for D=4
Polyphase Decimation Filters
Figure 7–14 shows a direct implementation of a decimation filter, which
imposes a high computational burden. For example, if the filter is 16 taps
long and a multiplication takes one cycle, the number of computations
required per cycle is 16× D. Depending on the decimation factor (D), this
number can be quite big and may not be achievable in hardware. A
polyphase implementation of the low pass filter can reduce the number
of computations required, often by a large ratio, as will be evident later in
this section.
The polyphase implementation “splits” the original filter into D
polyphase filters with impulse responses defined by the following
equation.
h
k
n() hk nD+()=