CAUTION! Damage to the device as a result of incorrect operation!
Failure to exercise caution or follow proper working
procedures may result in damage to the device.
Themotorcanmovesuddenlyduringtheauto
commutation.Themechanismcoupledmustbe
designedforthismovement.
Ifthecommutationpositionisnotdeterminedcorrectly,
themotorwillaccelerateinanuncontrolledmanner.
This can lead todamagetothemechanicalsystem.
Makesuretocarefullytesttheautocommutation
function.Varythestartposition.Even if
autocommutation has not been performed, the drive
can be “made to rotate” in up to 50 % of cases.
Enable speed tracking error monitoring (P 744[0] -
SDiffMax, Section "Speed- / velocity limits" on page
253. This monitoring function provides extensive
protection against uncontrolled movement.
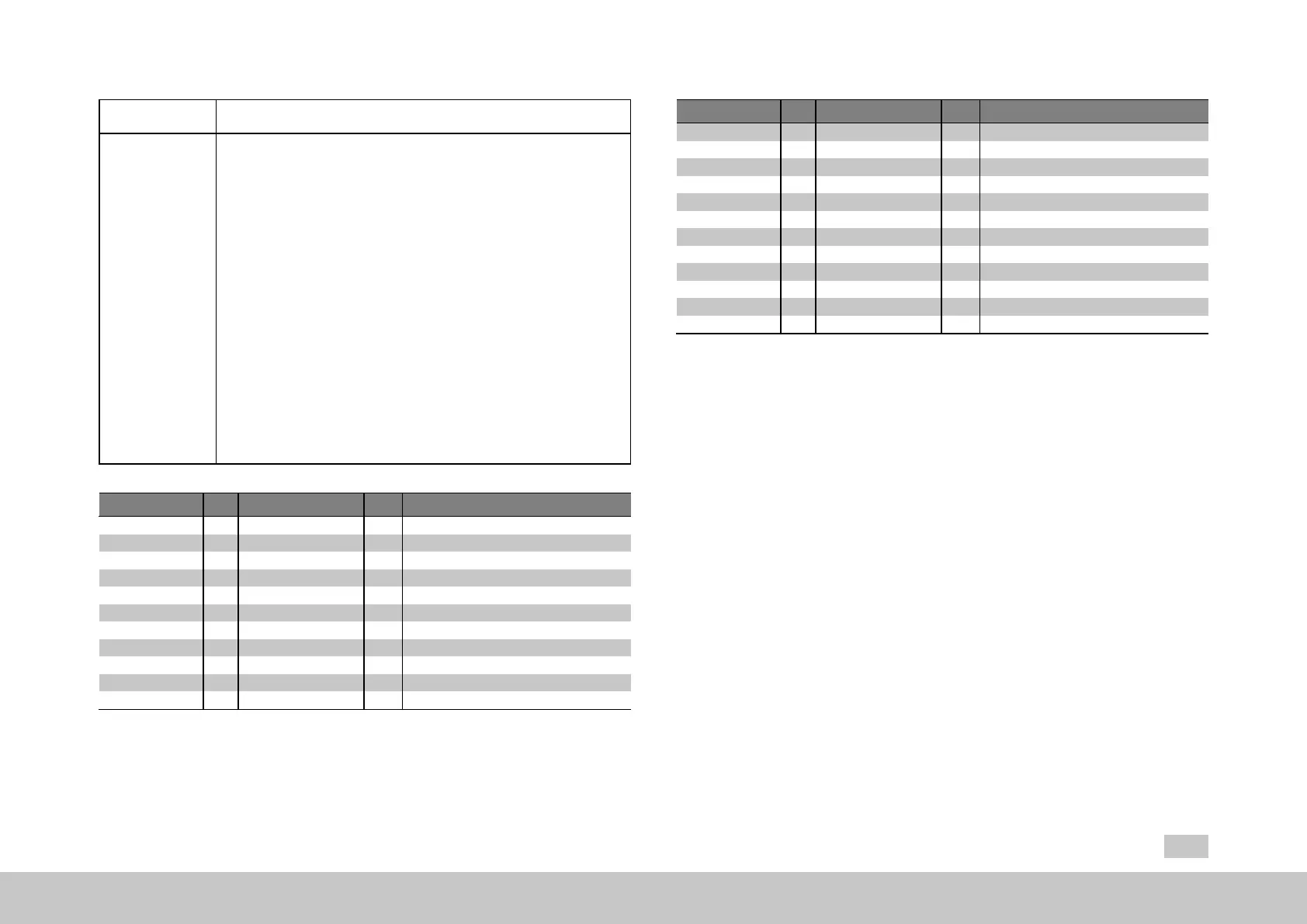
ID Index Name / Setting Unit Description
365 0 CON_ICOM_AutoOn autorecommutationafterselectedevent
366 0 CON_ICOM_RefSpeed rpm commutationdetection:scalingofcontrolgain
390 0 CON_ICOM Autocommutation:Controlwordforselection
Off(0) Functiondisabled
IENCC(1) Currentinjection
LHMES(2) Saturationofinductanceevaluated
IECSC (3) Not yet implemented
IECON(4) Currentinjection,minimizedmovement
HALLS (5) Not yet implemented
HALLSDIGITAL(6) DigitalHallsensor
HALLSDIGITAL2(7) DigitalHallsensor(alternateprocess)
Table 7.27: “Auto commutation” parameters
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
145
7 Control
ID Index Name / Setting Unit Description
391 0 CON_ICOM_KpScale % commutationdetection:scalingofcontrolgain
392 CON_ICOM_Time commutationdetection:times
392 0 CON_ICOM_Time ms
392 1 CON_ICOM_Time ms
392 2 CON_ICOM_Time ms
392 3 CON_ICOM_Time ms
393 CON_ICOM_Current commutationdetection:currents
393 0 CON_ICOM_Current A
393 1 CON_ICOM_Current A
394 CON_ICOM_Check Monitoringautocommutation
394 0 LIMIT degree Autocommutation:Angleerrorlimit
394 1 ActVal degree Autocommutation:Actualangleerrorvalue
Table 7.27: “Auto commutation” parameters (continue)

 Loading...
Loading...