Echosoundertheory
Table2Maximumdetectiondepth,splitbeamtransducers(cont'd.)
TransducerFrequency
(kHz)
Pulse
duration
(ms)
Bandwidth
(hz)
Txpower
(W)
Rangesh
(m)
Range
bottom(m)
ES70–11702,0515268004501100
ES120–7C1201,0230261000440850
ES200–7C2001,0230881000270550
Theserangecalculationsassumeanormalseawatersalinity(3.5ppt)andtemperature
(+10°C),anaveragebottom(surfacebackscatteringstrength=-20dB)andanoise
leveltypicalforamovingvessel.
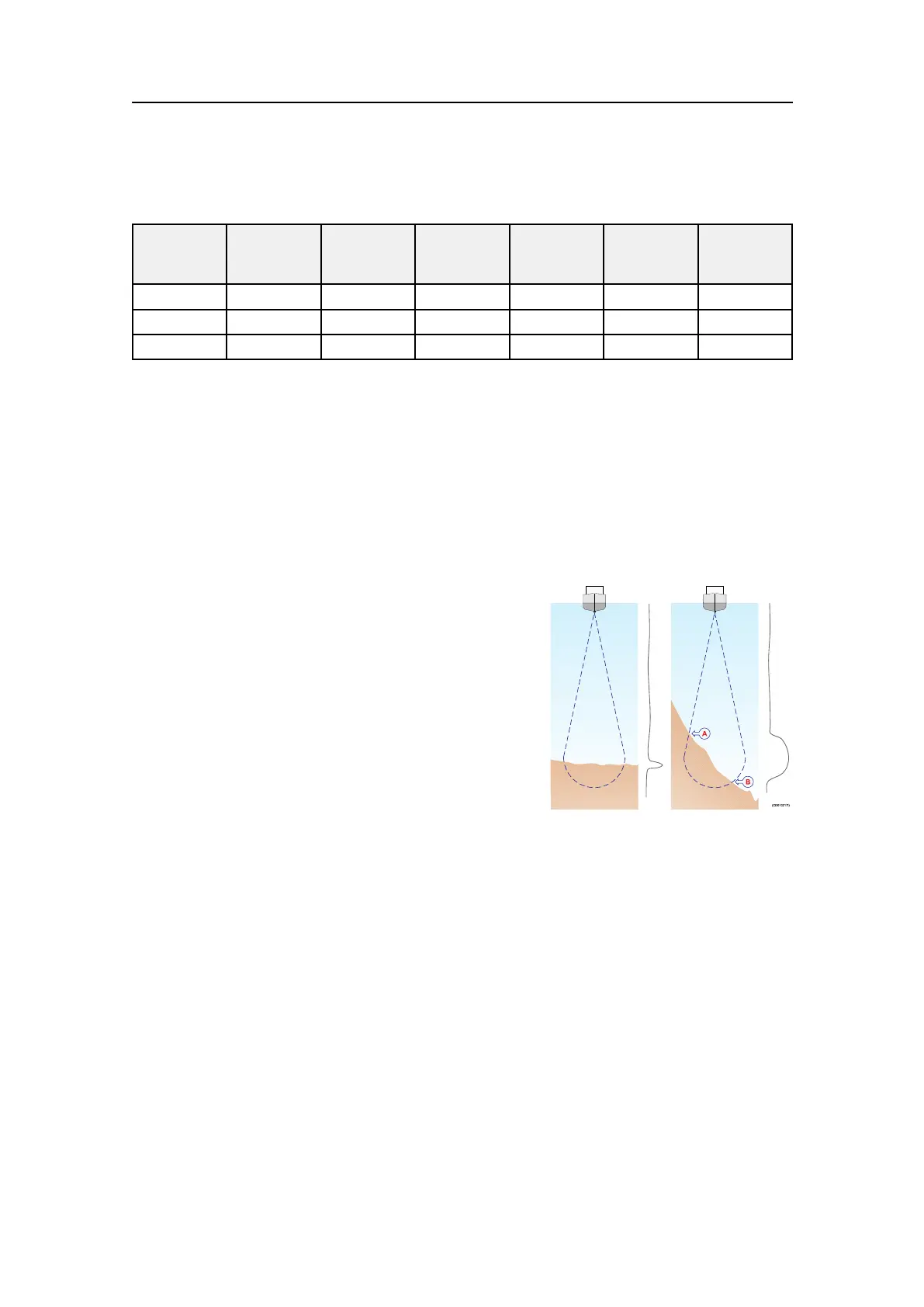
Bottomecho
Ahardatbottomreectsthetransmittedsignalasifitwasamirror.Thetransmitted
pulsehitstheilluminatedbottomareaatnearlythesameinstant,andtheechofrom
differentpartsofthisareaarrivebackatthesurfacealsoatnearlythesameinstant.
Thereceivedechosignalisbasicallyanattenuated
copyoftheshorttransmitpulse.Theechosignal
fromaslopedbottomischaracterizedbyhavinga
longerdurationandaslowerriseandfalltime.The
transmittedpulsersthitstheslopeatpoint(A),
andastimeelapsesthereectionpointtravelsalong
theslopetowardspoint(B).Manylocationsdonot
haveasolidhardbottom.Frequently,thebottom
iscomposedoflayersofmud,clayandsandwhich
canbeobservedascolouredbandsontheecho
sounderdisplay.
Thebottomdetectionalgorithmisimplementedsolelyinsoftware,andseparate
algorithmsarerunforeachfrequencychannel.Thealgorithmisdesignedwithemphasis
onreliabilityinthesensethaterroneousdepthdetectionsareneveroutput.Wheneverthe
qualityofadetectionisquestionablethealgorithmoutputsadepthof0.00toindicatethat
noreliabledetectionwasobtained.TheEK15algorithmisdesignedtohandleanumber
ofdifcultsituations.Thealgorithmmaintainsbottomlockforadiscontinuousjumpin
bottomdepth.Itavoidsfalsebottomdetectionsonadenseschoolofsh.Thealgorithm
choosestheupperboundaryoftherstlayerwhenthebottomconsistsoflayers.
Thebottomdetectionalgorithmlockstotherstgoodbottomreturn.Thedepthatpoint
Aratherthanthedepthalongthetransduceraxiswillbeoutputforaslopedbottom.The
detecteddepthvalueisalwayssmallerthanthedepthalongthetransduceraxisimplying
thatasafetymarginisautomaticallyincluded.
351718/C
269