SimradEK15
Choosingtheverticalrange
Purpose
Thisprocedureexplainshowtosettheverticalrange;
thedistancefromtheseasurfaceanddowntothe
bottom.ThisverticalrangeiscontrolledbyRangeon
theMainmenu.
Example6StartRangeandRangeinbottomrelated
echogram
Inabottomechogram,settheStartRangevalueto–5meters.Thiswillmakethe
echogramstartfrom5metersabovethebottom.SetRangetothe5metersplus
10=15meters.Theechogramwillnowshowtheareafrom5metersabovethe
depth,anddownto10meters“below”thebottom.Thebottomcontourwillappear
asaatline.
Relatedtopics
•Rangefunctiononpage144
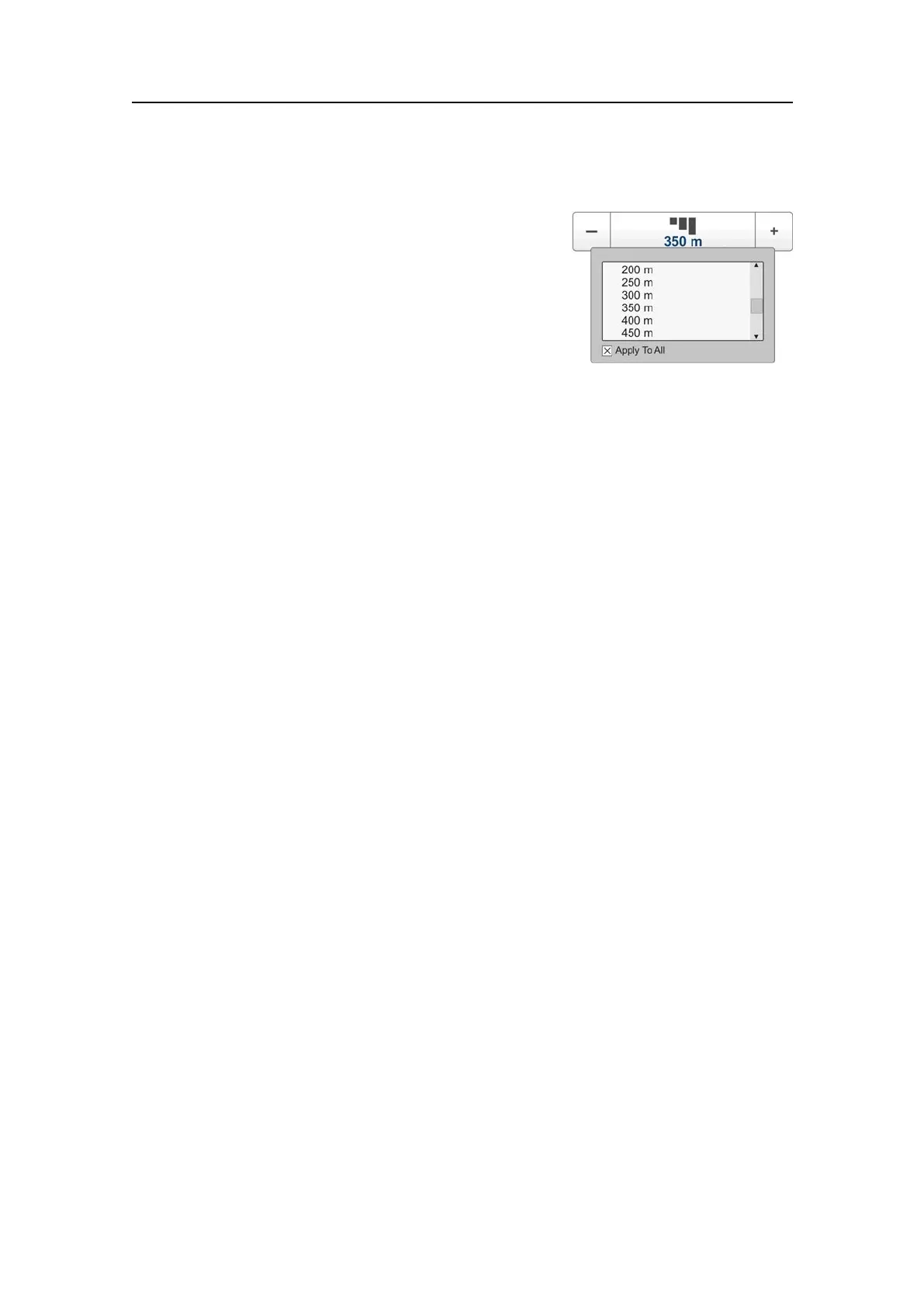
Procedure
Thefollowingmethodscanbeused.
1Method1:
aClick[+]or[-]toadjusttherangemanually.
2Method2:
aClickthemiddleofthebuttontoopenit.
bClickanyrangevalue(includingAutowhenavailable)toselectit.
Bottomdetectionprocedures
Theseproceduresexplainhowyoucancontrolthebottomdetection.Topics•Deningmaximumandminimumdepthsonpage72
Deningmaximumandminimumdepths
Purpose
WhenyouusetheEK15itisveryimportantthatitdetectsand“locks”onthecorrect
depth.Normallythiswillhappenautomatically.However,certainconditions(suchas
noiseorairunderthehull),ortheappearanceoflargeschoolsofsh,may“fool”the
sounder.Whenthebottomisundetectedyouwillread0.00metersdepth.
InordertoguidetheEK15tolocatethecorrectdepth,youmaysometimesndituseful
tofollowthisprocedure.
72
351718/C