7.7.8 Parameters 51-02, 52-04, and 52-49: Application Settings (0x2016)
There are several general settings regarding the behavior of the servo drive.
Sub-index 01: Observer speed enable
Enables the speed observer. The purpose of the observer is to improve the quality of the calculated speed signal from
position sensor. When enabled, the control bandwidth is higher.
Sub-index 02: Drive mirror mode
This object provides a way to set/clear the drive mirror mode. Setting mirror mode reverses the turning direction of the axis,
useful when, for example, it is used with an inverting gear box.
Sub-index 03: Save position oset
Write 1 to save the position oset to non-volatile memory. After it is saved, the servo drive writes a 0 back to the object so
that it can be rewritten with 1. If a new homing process starts, the position oset is overwritten, but not stored automat-
ically. If the servo drive is reset, the last saved position oset is reused. The Is Homed bit in the Statusword is not set during
start-up. It is only set if a new homing procedure completed successfully.
For single-turn encoders, only the fractional part is preserved.
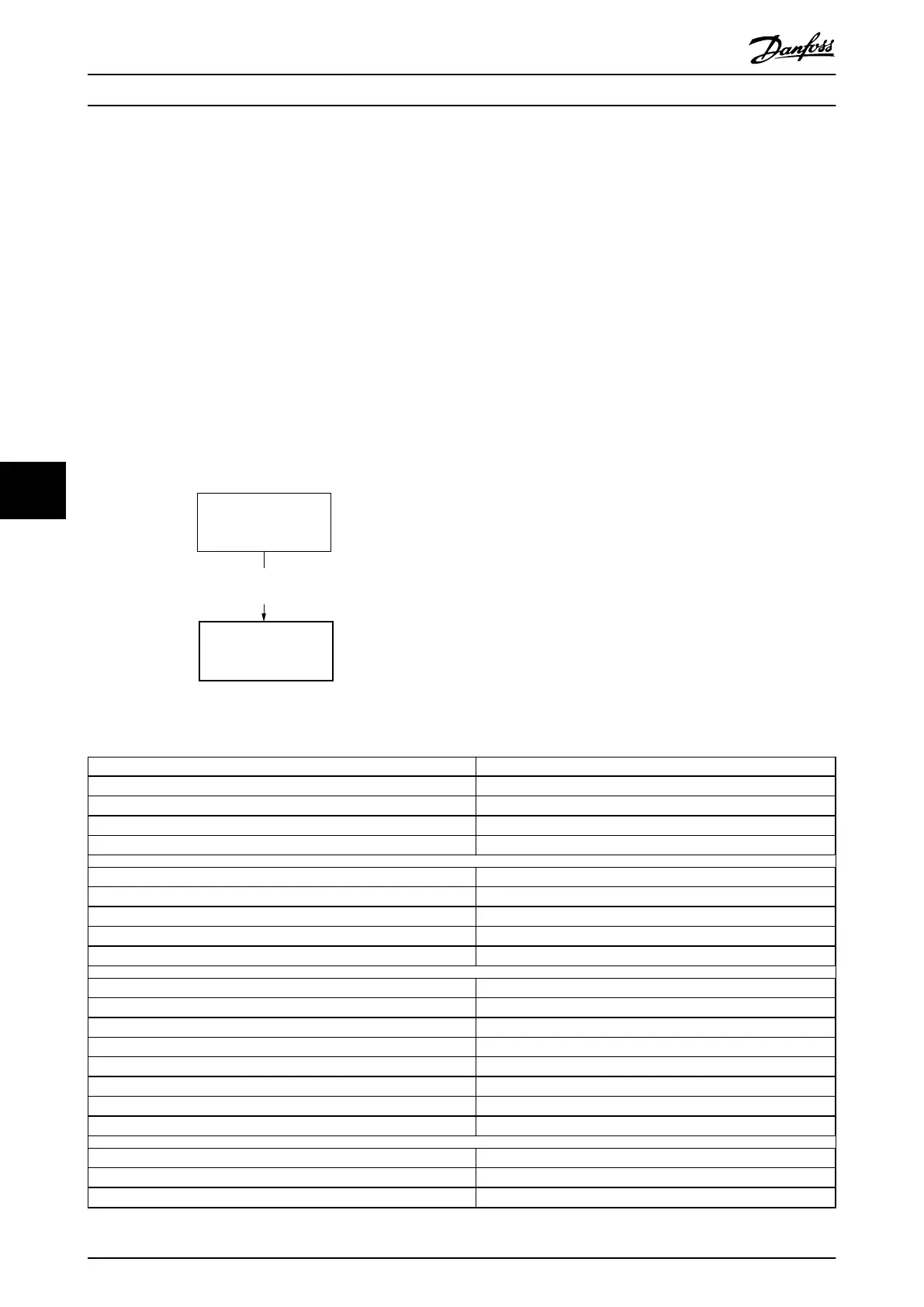
Physical (Absolute) Position
(–)
TRC_ROTOR_POS
[increments]
Position oset =
permanent position oset + temporary position oset
(temporary position oset is set during homing)
Position Actual Internal
Value
(0x6063)
[increments]
130BF213.10
Illustration 7.1 Explanation of Position Oset
Attribute Value
Index 0x2016
Name Application settings
Object code Array
Data type UNSIGNED16
Sub-index 0x00
Description Value of highest sub-index
Access Const
PDO mapping No
Default value 0x03
Sub-index 0x01
LCP parameter number 51-02
Description Observer speed enable
Access Read/write
Data type UNSIGNED16
PDO mapping Optional
Value range 0, 1
Default value 0
Sub-index 0x02
LCP parameter number 52-04
Description Drive mirror mode
Servo Drive Parameter Descr...
VLT
®
Integrated Servo Drive ISD
®
510 System
264 Danfoss A/S © 01/2017 All rights reserved. MG36D102
77

 Loading...
Loading...







