For the inputs Velocity, VelocityOut, Acceleration, Deceleration, and BlockedVelocity, a value of 0 is not allowed and leads to an
error. This only applies to inputs that are required for the selected homing mode. The value of BlockedVelocity must be
smaller than the value of Velocity.
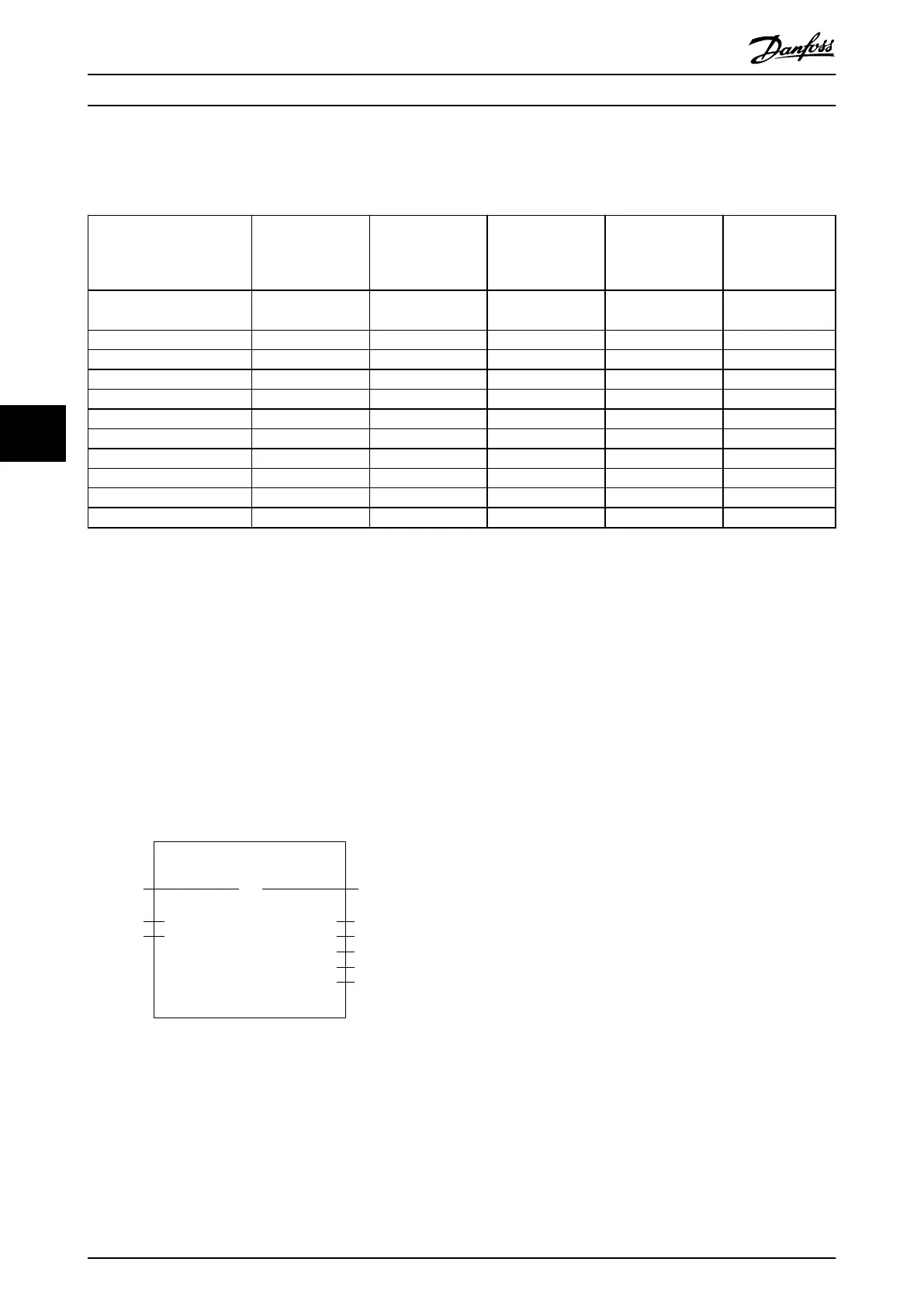
ddAbsolute_ISD51x ddPosBlock_ISD51x
or
ddNegBlock_ISD51x
ddPosLimSwitch_IS
D51x or
ddNegLimSwitch_IS
D51x
ddPosHo-
meSwitch_ISD51x
or ddNegHo-
meSwitch_ISD51x
ddDirect_ISD51x
Required PLCopen® state
before start
Standstill or
disabled
Standstill Standstill Standstill Standstill or
disabled
Position – X X X X
Velocity – X X X –
VelocityOut – – X X –
Acceleration – X X X –
Deceleration – X X X –
TorqueLimit – X X X –
BlockedVelocity – X – – –
BlockedDuration – X – – –
TimeLimit – X X X –
DistanceLimit – X X X –
Table 6.38 Inputs marked with X must have a valid value
6.5.5.2 MC_Stop_ISD51x
This function block commands a controlled motion stop
and transfers the axis to the state Stopping. It aborts any
ongoing motion. When the axis is in state Stopping, no
other function block can perform any motion on the same
axis. After the axis has reached the velocity 0, the Done
output is set to TRUE immediately (see
chapter 7.20.2 Parameter 50-42: Target Reached Option Code
(0x2054)). The axis remains in the state Stopping for as long
as Execute is still TRUE, or until the target velocity 0 has
been reached. As soon as Done is set to TRUE and Execute
is FALSE, the axis changes to state Standstill.
MC_Stop_ISD51x
ExecuteBOOL
Axis
AXIS_REF_-
ISD51x
BOOLBusy
BOOLDone
BOOLCommandAborted
BOOLError
DD_ERROR_ISD51xErrorInfo
DecelerationUDINT
130BE301.10
Illustration 6.59 MC_Stop_ISD51x
This function block is primarily intended for emergency
stop functionality or exception situations. Calling this
function block in state Standstill changes the state to
Stopping and back to Standstill when Execute is FALSE. The
state remains as Stopping for as long as the input Execute
is TRUE. The Done output is set when the stop ramp is
nished.
If this function block is aborted (by setting
MC_Power.Enable to FALSE), or if an error appears in the
axis, the blocking of the axis by this function block is
released immediately. In this case, it is not necessary to set
Execute to FALSE rst to release the axis.
A value of 0 is not allowed for the Deceleration input.
The command is transferred and executed immediately.
Programming
VLT
®
Integrated Servo Drive ISD
®
510 System
200 Danfoss A/S © 01/2017 All rights reserved. MG36D102
6
6

 Loading...
Loading...







