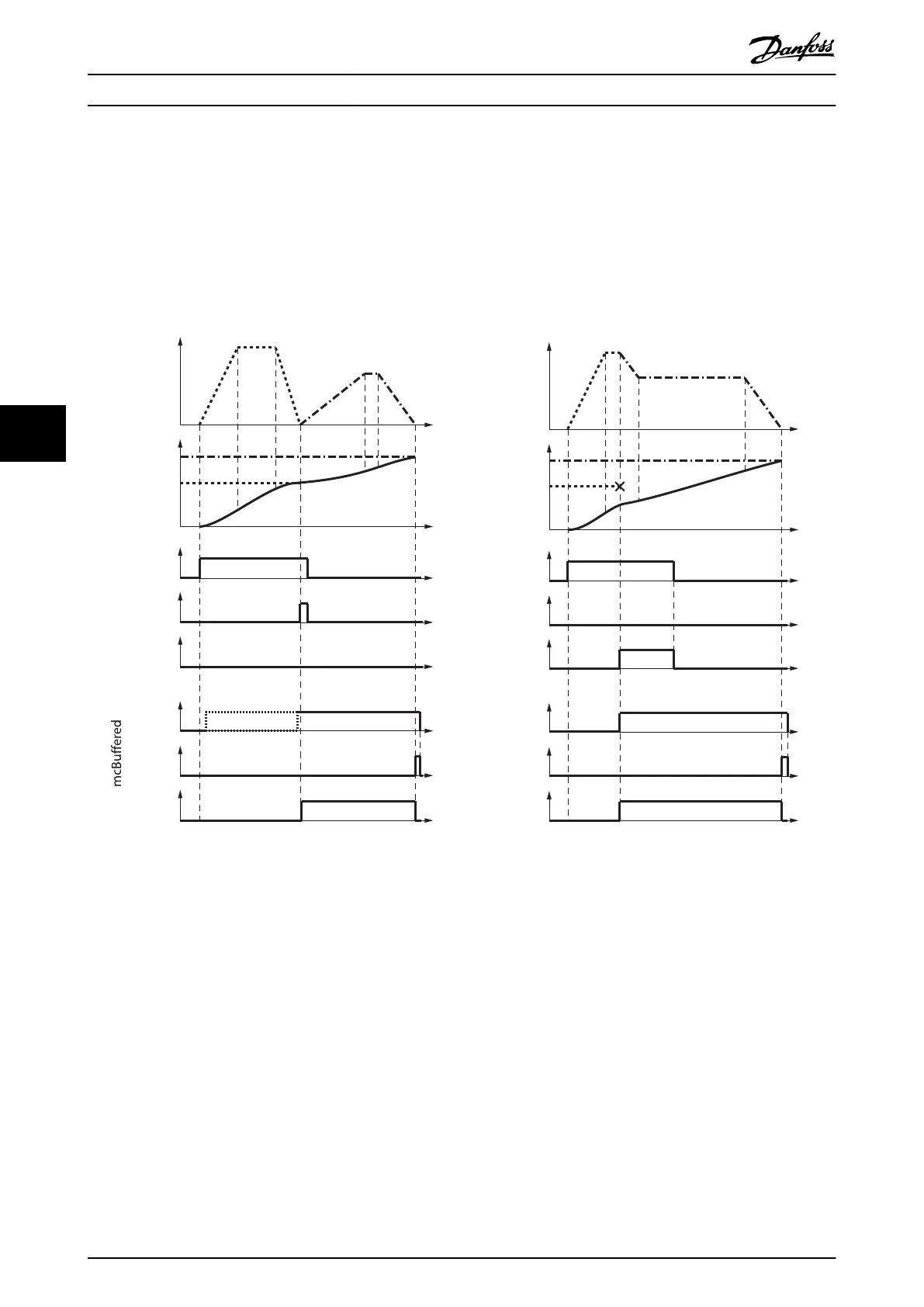
MC_MoveAbsolute with BuerMode = Aborting
The potentially ongoing positioning is aborted immediately. The new target position is the value of the Position input of
MC_MoveAbsolute_ISD51x. The trajectory parameters (Velocity, Acceleration, and Deceleration) are used immediately.
MC_MoveAbsolute with BuerMode = Buered
The potentially ongoing positioning is nished rst. The original target position is reached and the velocity in this target
position is 0. The new target position is the value of the position input of MC_MoveAbsolute_ISD51x. This means that it is the
exact same end position as with BuerMode = mcAborting_ISD51x.
The trajectory parameters (Velocity, Acceleration, and Deceleration) are only used for the 2
nd
movement.
VelocityPosition
MoveAbsolute
MoveAbsolute
FB1.
Execute
FB2.
Execute
FB1.
Done
FB2.
Done
FB2.
Active
FB1.
Command
Aborted
VelocityPosition
MoveAbsolute
MoveAbsolute
mcAborting
FB1.
Execute
FB2.
Execute
FB1.
Done
FB2.
Done
FB2.
Active
FB1.
Command
Aborted
130BE950.10
Illustration 6.62 Buered versus Aborting with MC_MoveAbsolute
Programming
VLT
®
Integrated Servo Drive ISD
®
510 System
204 Danfoss A/S © 01/2017 All rights reserved. MG36D102
6
6

 Loading...
Loading...







