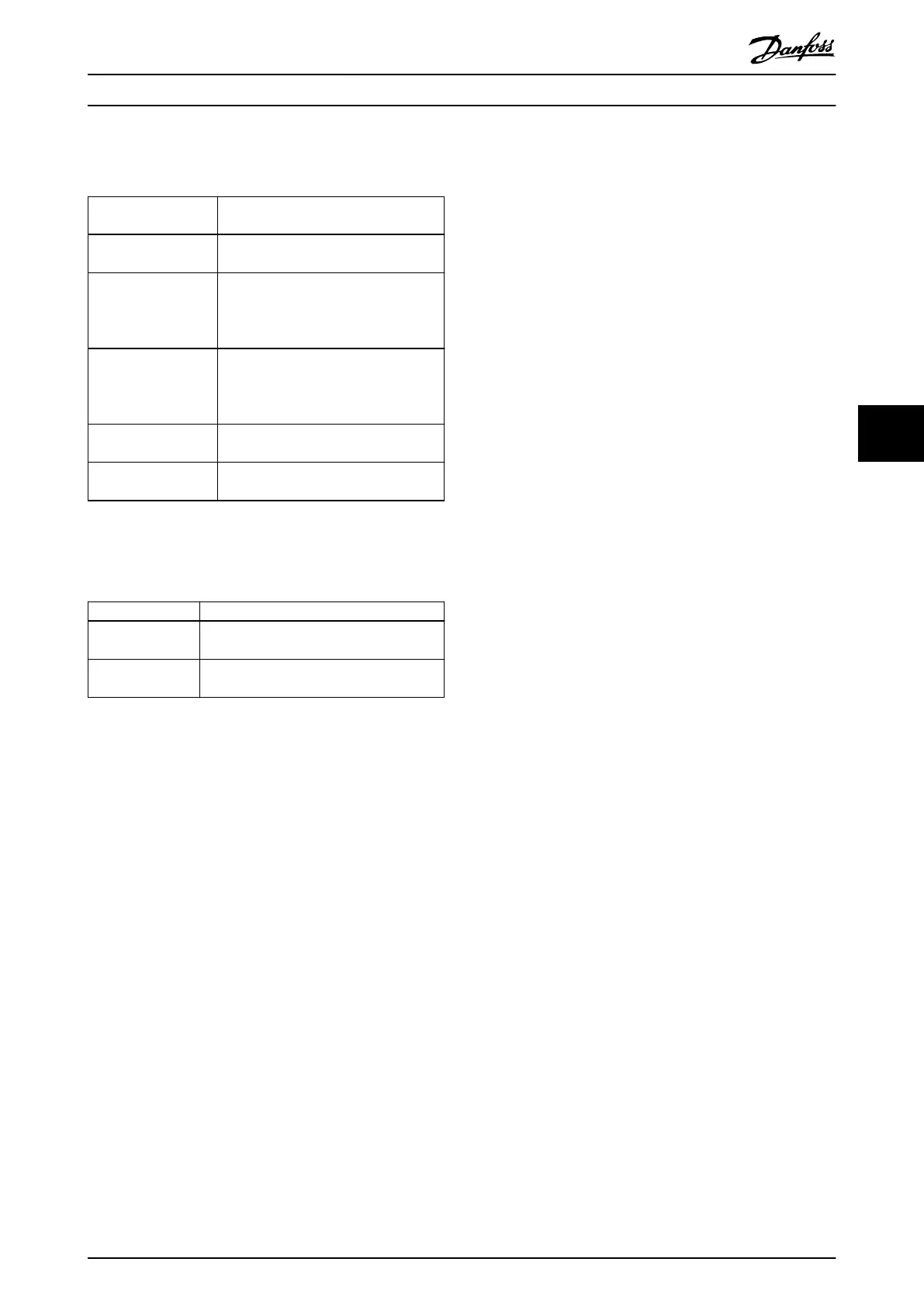
Enumeration MC_DIRECTION_ISD51x denes the direction
used to reach the target of a periodic axis.
Name Description
mcCurrentDir-
ection_ISD51x
Movement in direction of the last known
positioning direction.
mcNegativeDir-
ection_ISD51x
Movement only in negative direction; If
the target position is higher than the
actual position, the axis moves over the
position wrap around.
mcPositiveDir-
ection_ISD51x
Movement only in positive direction; If
the target position is lower than the
actual position, the axis moves over the
position wrap around.
mcShor-
testWay_ISD51x
Movement with the shortest distance to
the target position.
mcLinearAxis_ISD51x Normal movement similar to a linear
axis.
Table 6.42 Enumeration MC_DIRECTION_ISD51x
Enumeration MC_BUFFER_MODE_ISD51x denes the
chronological sequence of the function block.
Name Description
mcAborting_ISD51x Actual positioning process is aborted and
replaced with a new one.
mcBuered_ISD51x Actual positioning process is continued and
the next follows.
Table 6.43 Enumeration MC_BUFFER_MODE_ISD51x
The
buer mode itself is described in more detail in
chapter 2.4.1 Prole Position Mode. It is only possible to
have 1
buered position. Any attempt to make a 2
nd
buered command leads to an error.
Programming Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 203
6
6

 Loading...
Loading...







