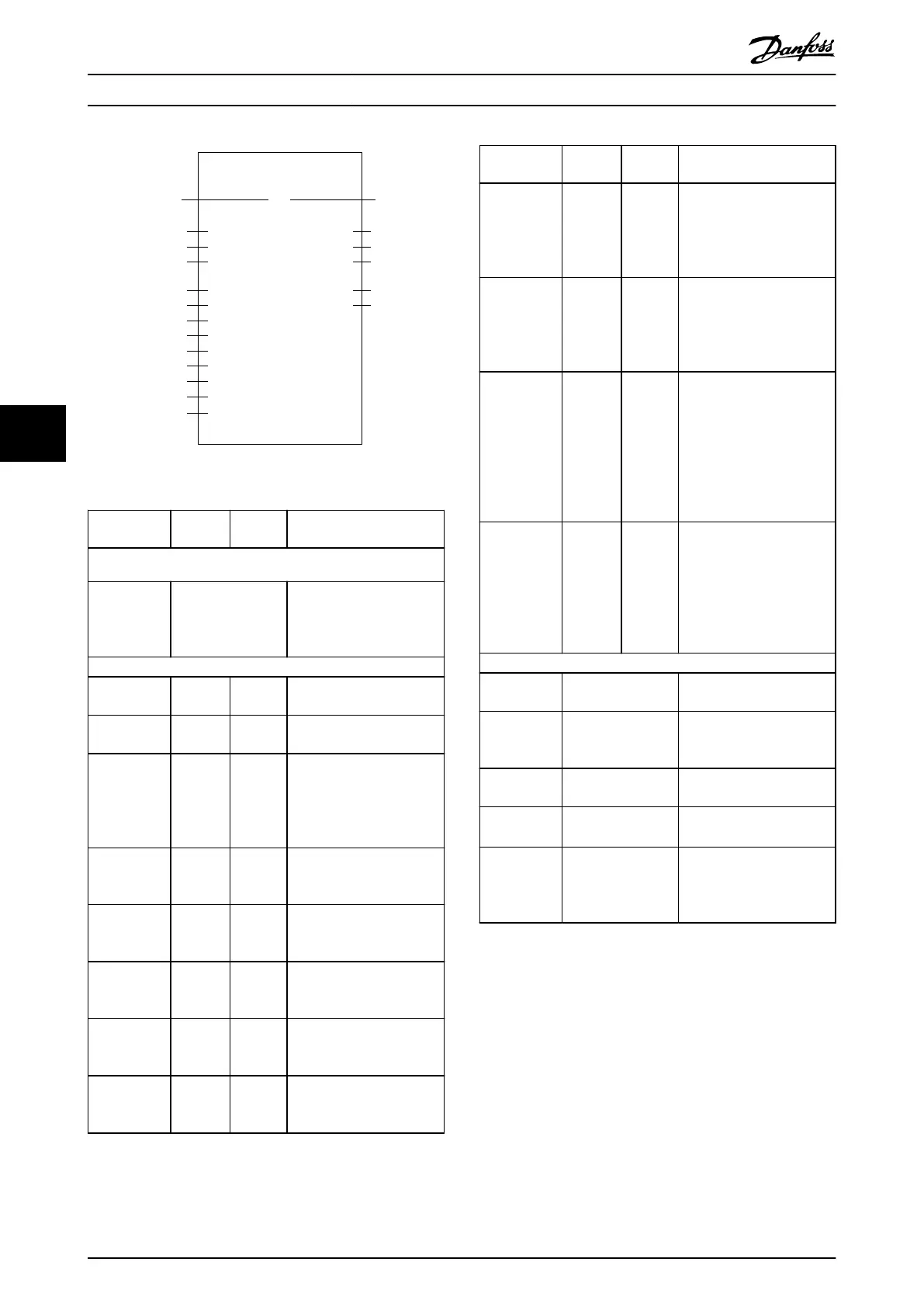
MC_Home_ISD51x
ExecuteBOOL
Axis
AXIS_REF_ISD51x
BOOLDone
BOOLCommand
Aborted
BOOL
BOOLError
DD_ERROR_-
ISD51x
ErrorInfo
Busy
PositionDINT
VelocityUDINT
VelocityOutUDINT
AccelerationUDINT
DecelerationUDINT
TorqueLimitUINT
BlockedVelocityUDINT
BlockedDurationUINT
TimeLimitTIME
DistanceLimitUDINT
ModeDD_HOME_-
MODE_ISD51x
Illustration 6.58 MC_Home_ISD51x
Variable
name
Data
type
Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_ISD
51x.
VAR_INPUT
Execute BOOL FALSE Start the motion at rising
edge.
Position DINT 0 Absolute position set [user-
dened position unit].
Mode DD_HOM
E_MODE_
ISD51x
ddDirect
_ISD51x
Denes the method used
for homing. Depending on
this selection, the
appropriate input variables
are used.
Velocity UDINT 0 Value of the speed during
search for switch/block
[user-dened velocity unit].
VelocityOut UDINT 0 Value of speed during
search for edge of switch
[user-dened velocity unit].
Acceleration UDINT 0 Value of the acceleration
[user-dened acceleration
unit].
Deceleration UDINT 0 Value of the deceleration
[user-dened acceleration
unit].
TorqueLimit UINT 0xFFFF Maximum torque used for
this motion [per thousand
of rated torque].
Variable
name
Data
type
Default
value
Description
BlockedVe-
locity
UDINT 0 Axis assumes that it is
blocked when the actual
speed falls below the limit
given here [user-dened
velocity unit].
BlockedDu-
ration
UINT 5 Axis assumes that it is
blocked when the actual
speed falls below the
BlockedVelocity for the
duration given here [ms].
TimeLimit TIME t#0ms Timeout after which an
error is signaled if the
homing procedure has not
been completed. The
homing procedure is
aborted automatically. Set
the value to 0 to disable
the time limit.
DistanceLimit UDINT 0 Maximal distance in which
the limit switch must be
reached. Otherwise, the
homing procedure is
aborted with an error. Set
the value to 0 to disable
the distance limit.
VAR_OUTPUT
Done BOOL Reference known and set
successfully.
Busy BOOL The function block is not
nished and new output
values are to be expected.
CommandA-
borted
BOOL Command is aborted by
another command.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.36 MC_Home_ISD51x
The homing modes can be selected from the enumerations
in Table 6.37.
Programming
VLT
®
Integrated Servo Drive ISD
®
510 System
198 Danfoss A/S © 01/2017 All rights reserved. MG36D102
6
6

 Loading...
Loading...







