6.5.5.7 MC_MoveVelocity_ISD51x
This function block commands a never ending controlled
motion at a specied velocity. To stop the motion,
interrupt the function block by issuing a new command
with another function block. The signal InVelocity is reset
when the function block is aborted by another function
block. Only positive values are allowed for the inputs
Acceleration and Deceleration.
The command is transferred and executed immediately.
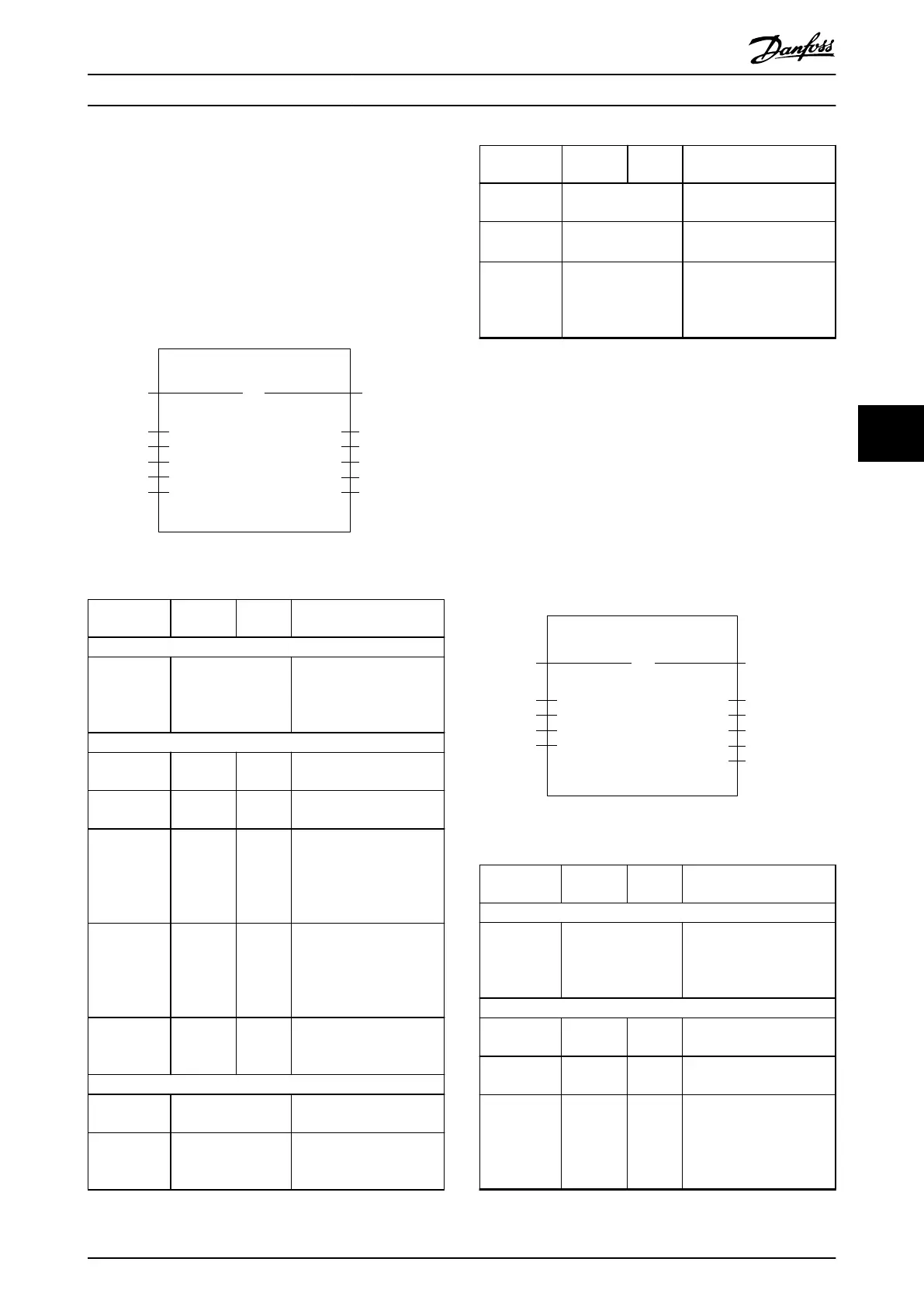
MC_MoveVelocity_ISD51x
ExecuteBOOL
Axis
AXIS_REF_-
ISD51x
BOOLBusy
BOOLInVelocity
BOOLCommandAborted
BOOLError
DD_ERROR_-
ISD51x
ErrorInfo
AccelerationUDINT
DecelerationUDINT
TorqueLimitUINT
VelocityDINT
130BE287.10
Illustration 6.67 MC_MoveVelocity_ISD51x
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Start the motion at rising
edge.
Velocity DINT 0 Value of the target velocity
[user-dened velocity unit].
Acceleration UDINT 0 Value of the acceleration
(increasing energy of the
motor) [user-dened
acceleration unit]. Only
values >0 are allowed.
Deceleration UDINT 0 Value of the deceleration
(decreasing energy of the
motor) [user-dened
acceleration unit]. Only
values >0 are allowed.
TorqueLimit UINT 0xFFFF Maximum torque used
during this motion [per
thousand of rated torque].
VAR_OUTPUT
InVelocity BOOL Commanded velocity
reached.
Busy BOOL The function block is not
nished and new output
values are to be expected.
Variable
name
Data type Default
value
Description
CommandA-
borted
BOOL Command is aborted by
another command.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.46 MC_MoveVelocity_ISD51x
6.5.5.8 MC_TorqueControl_ISD51x
This function block continuously exerts a torque or force of
the specied magnitude. This magnitude is reached using
a dened ramp (TorqueRamp), and the function block sets
the InTorque output if the commanded torque level is
reached. If there is no external load, force is applicable.
Positive torque is in the positive direction of velocity and
the movement is limited by velocity. Only positive values
are allowed for the inputs TorqueRamp and Velocity.
The command is transferred and executed immediately.
MC_TorqueControl_ISD51x
ExecuteBOOL
Axis
AXIS_REF_-
ISD51x
BOOLBusy
BOOLInTorque
BOOLCommandAborted
BOOLError
DD_ERROR_ISD51xErrorInfo
TorqueRampUDINT
VelocityDINT
TorqueINT
130BE302.10
Illustration 6.68 MC_TorqueControl_ISD51x
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Start the motion at rising
edge.
Torque INT 0 Value of the target torque
[user-dened velocity unit].
TorqueRamp UDINT 0 The maximum time
derivative of the set value
of the torque or force [in
technical units per s]. Only
values >0 are allowed.
Programming Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 209
6
6
 Loading...
Loading...








