7.3.1.1 Statusword in Prole Position Mode
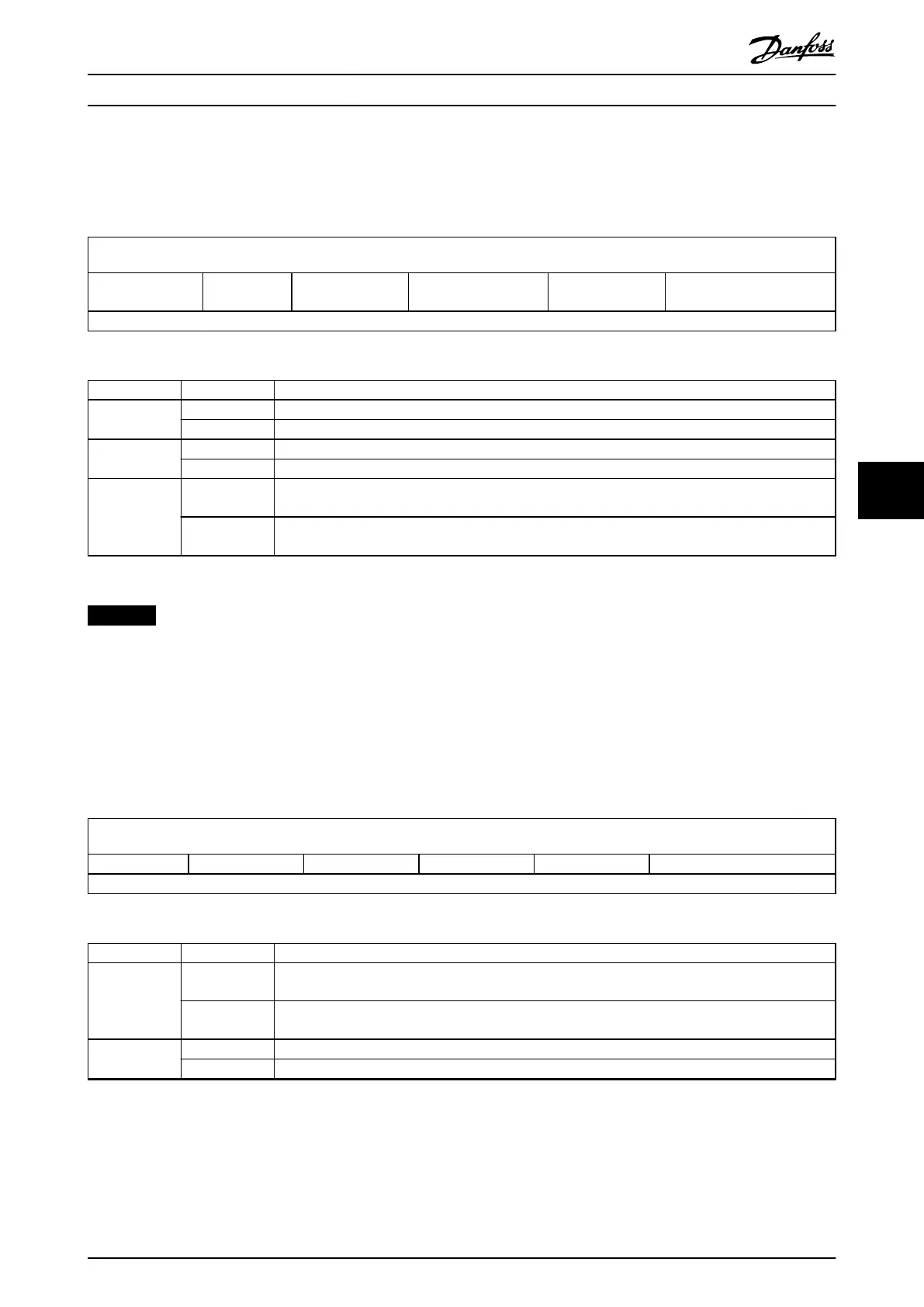
The Prole Position mode uses some bits of the Statusword for operation mode-specic purposes. Table 7.26 shows the
structure of the Statusword. Table 7.27 denes the values for bits 10, 12, and 13.
15 14 13 12 11 10 9 0
See Table 7.23 Following error
Setpoint
acknowledge
See Table 7.23 Target reached See Table 7.23
MSB LSB
Table 7.26 Statusword in Prole Position Mode
Bit Value Denition
13 0 No following error.
1 Following error.
12 0 Previous setpoint already processed, waiting for new setpoint.
1 Previous setpoint still in process, setpoint overwriting is accepted.
10 0 Halt (bit 8 in Controlword) = 0: Target position not reached.
Halt (bit 8 in Controlword) = 1: Axis decelerates.
1 Halt (bit 8 in Controlword) = 0: Target position reached.
Halt (bit 8 in Controlword) = 1: Velocity of axis is 0.
Table 7.27 Denition of Bits 10, 12, and 13
NOTICE
Bit 10: Refer to Target reached option code (see chapter 7.20.2 Parameter 50-42: Target Reached Option Code (0x2054)) to
inuence the behavior of this bit. Also refer to Illustration 2.17 in chapter 2.4.1 Prole Position Mode for the functional
description.
Bit 13: Refer to chapter 2.7.3 Following Error Detection for more information about the following error detection.
7.3.1.2 Statusword in Prole Velocity Mode
The Prole Velocity mode uses some bits of the Statusword for operation mode-specic purposes. Table 7.28 shows the
structure of the Statusword. Table 7.29 denes the values for bits 10 and 12.
15
14 13 12 11 10 9 0
See Table 7.23. Reserved (0) Speed See Table 7.23. Target reached See Table 7.23.
MSB LSB
Table 7.28 Statusword in Prole Velocity Mode
Bit Value Denition
10 0 Halt (bit 8 in Controlword) = 0: Target velocity not reached.
Halt (bit 8 in Controlword) = 1: Axis decelerates.
1 Halt (bit 8 in Controlword) = 0: Target reached.
Halt (bit 8 in Controlword) = 1: Velocity of axis is 0.
12 0 Speed is not equal to 0.
1 Speed is equal to 0.
Table 7.29 Denition of Bits 10 and 12
Servo Drive Parameter Descr... Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 239
7 7

 Loading...
Loading...







