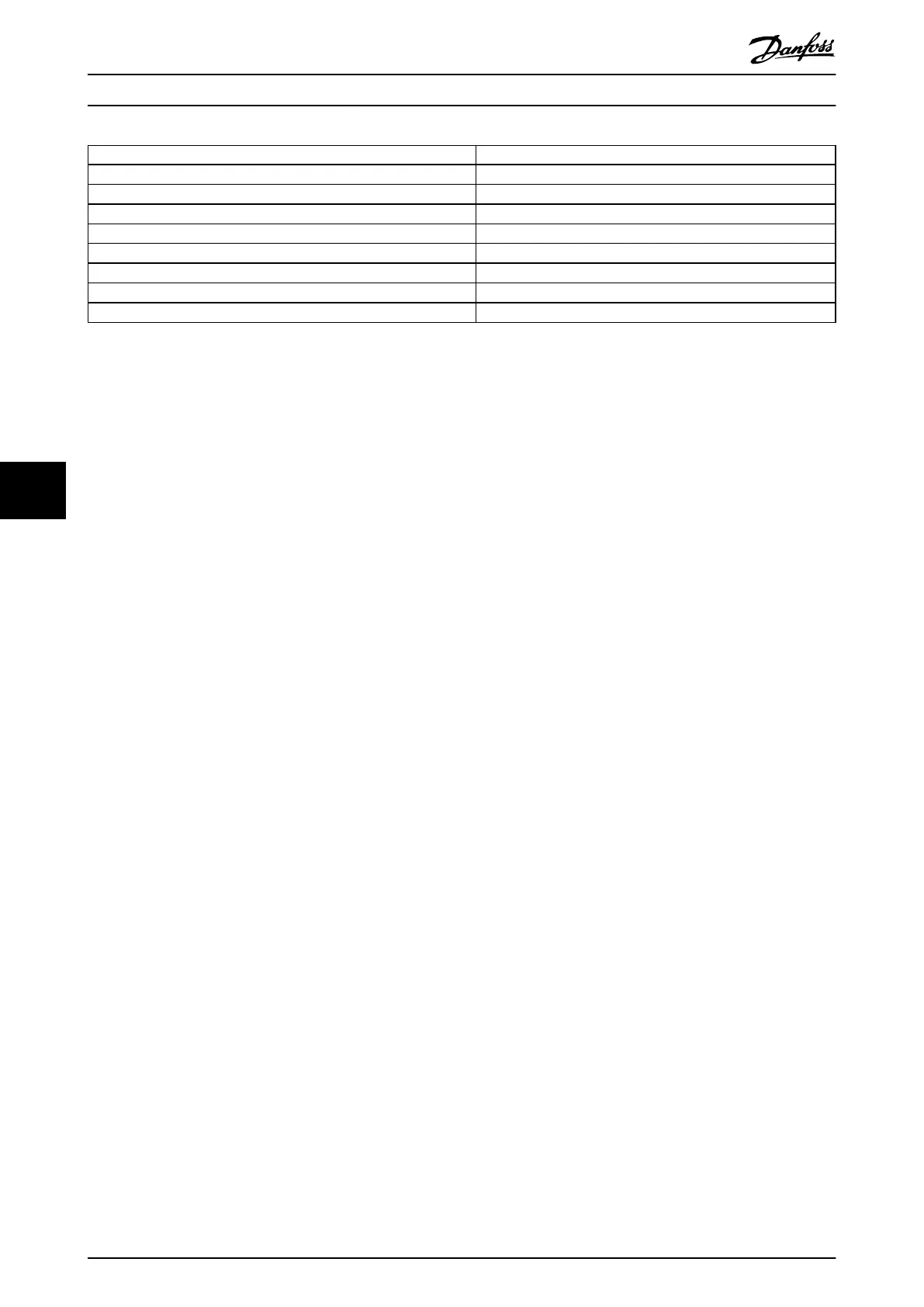
Statusword State
xxxx xxxx x0xx 0000b Not ready to switch on
xxxx xxxx x1xx 0000b Switch on disabled
xxxx xxxx x01x 0001b Ready to switch on
xxxx xxxx x01x 0011b Switched on
xxxx xxxx x01x 0111b Operation enabled
xxxx xxxx x00x 0111b Quick stop active
xxxx xxxx x0xx 1111b Fault reaction active
xxxx xxxx x0xx 1000b Fault
Table 7.25 State Coding
If bit 4 (voltage enabled) of the Statusword is 1, this indicates that high voltage is switched on.
If bit 5 (quick stop) of the Statusword is 0, this indicates that the servo drive is reacting on a quick stop request.
If bit 7 (warning) of the Statusword is 1, this indicates the presence of a warning condition. Warning is not an error or fault.
The status of the state machine is not changed. The cause of the warning is given in a special object, described in
chapter 7.22.10 Parameter 16-92: Warning Code (0x5FFE).
If bit 8
(manufacturer-specic: Is Homed) of the Statusword is 1, this indicates that there has been a successful homing
procedure. For details, refer to chapter 2.4.4 Homing Mode.
If bit 9 (remote) of the Statusword is 1, this indicates that the Controlword is processed. If it is 0 (local), this indicates that the
Controlword is not processed and the axis is controlled using the LCP.
If bit 10 (target reached) of the Statusword is 1, this indicates that the servo drive has reached the setpoint (see
chapter 7.20.2 Parameter 50-42: Target Reached Option Code (0x2054) for details on the meaning of “reached”). The setpoint is
operating
mode-specic and is dened in detail in the corresponding clauses. The change of a target value by software
alters this bit. If the Quick stop option code (see chapter 7.20.6 Parameter 50-46: Quick Stop Option Code (0x605A)) is 5, 6, or 7,
then bit 10 is set to 1 as soon as the quick stop operation is nished and the servo drive is halted. If the same internal value
is commanded, then bit 10 does not alter.
If bit 11 (internal limit active) of the Statusword is 1, this indicates that an internal limit is active. This bit is set as soon as an
internal limit occurs (for example, current limit) or when a trajectory is calculated and this is aected by at least 1 limitation
(for example, maximum acceleration versus prole acceleration). When a new trajectory is calculated, the bit is re-evaluated.
Bits 12 and 13 of the Statusword are operation mode-specic. Refer to the corresponding descriptions for the dierent
modes of operation for details on these bits.
If bit 14 (manufacturer-specic: STO) of the Statusword is 1, this indicates that the Safe Torque O has been activated. No
torque is applied to the servo drive. Check the safety voltage.
If bit 15 (manufacturer-specic: command error) of the Statusword is 1, this indicates that there has been a problem in
executing the command that has been sent over PDO.
Servo Drive Parameter Descr...
VLT
®
Integrated Servo Drive ISD
®
510 System
238 Danfoss A/S © 01/2017 All rights reserved. MG36D102
77

 Loading...
Loading...







