Target reached option code (0x2054)
Torque window time (0x2051)
Torque window (0x2050)
Torque actual value
Target reached
Target torque (0x6071)
Target demand (0x6074)
Target torque (0x6071)
Comparator
Selector
Timer
Window
comparator
Limit
function
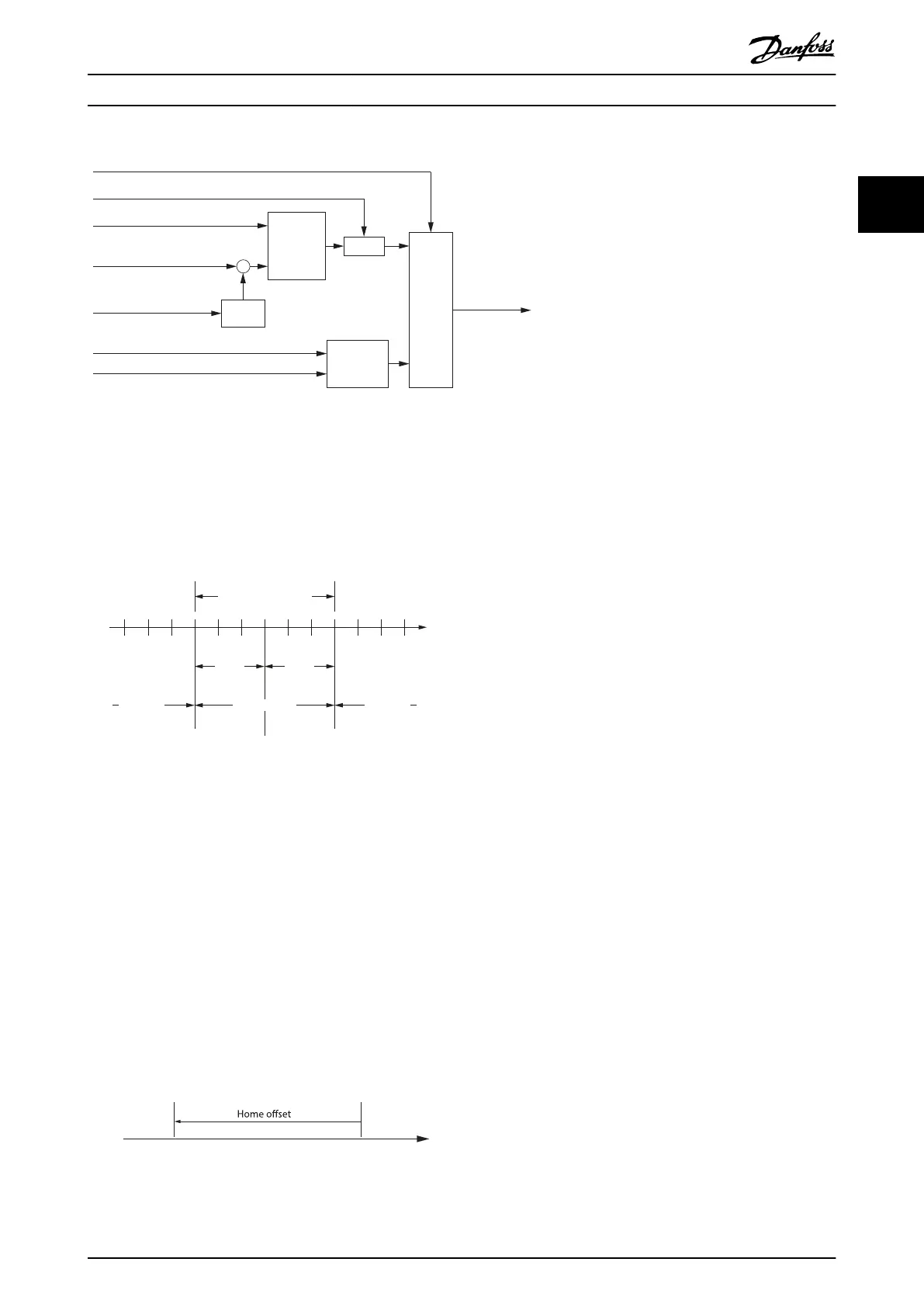
Illustration 2.24 Torque Reached - Functional Overview
Illustration 2.25 shows the denitions of the sub-function Torque reached. A window is dened for the accepted torque range
symmetrically around the velocity. If a servo drive is running within the accepted torque range over the time torque window
time, the bit target reached (bit 10) in the Statusword is set to 1.
Accepted torque range
Torque
window
Torque not
reached
Torque not
reached
Torque reached
Target
torque
Torque
Torque
window
130BF177.10
Illustration 2.25 Torque Reached Window
2.4.4 Homing Mode
In Homing mode, the application reference position of the servo drive can be set. Several homing methods, described in this
chapter, are available.
This functionality can be commanded using MC_Home_ISD51x (see chapter 6.5.5.1 MC_Home_ISD51x).
The home position is the position where an event was triggered. The type of event depends on the homing method (for
example, detection of an edge of a switch). Based on this home position and the home
oset (see chapter 7.13.1 Parameter
52-40: Home Oset (0x607C)), the new zero position is calculated (see Illustration 2.26).
Zero
position
Home
position
130BF569.10
Illustration 2.26 Home Oset Denition
Servo Drive Operation Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 33
2 2

 Loading...
Loading...







