Variable
name
Data type Default
value
Description
Velocity DINT 0 Value of the maximum
velocity (not necessarily
reached) [user-dened
velocity unit]. Only values
>0 are allowed.
VAR_OUTPUT
InTorque BOOL Setpoint value of torque or
force equals the
commanded value.
Busy BOOL The function block is not
nished and new output
values are to be expected.
CommandA-
borted
BOOL Command is aborted by
another command.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.47 MC_TorqueControl_ISD51x
6.5.5.9 MC_GearIn_ISD51x
This function block commands a synchronized motion with
the master. The slave ramps up to the ratio of the master
velocity and locks in when this is reached. Any lost
distance during synchronization is not caught up. The
gearing ratio can be changed while MC_GearIn_ISD51x is
running, using a new rising edge of the Execute input.
After being InGear, the servo drive is running position-
controlled. Only positive values are allowed for the inputs
Acceleration and Deceleration. The value 0 is not allowed
for the inputs RatioNumerator and RatioDenominator.
The command is transferred and executed immediately.
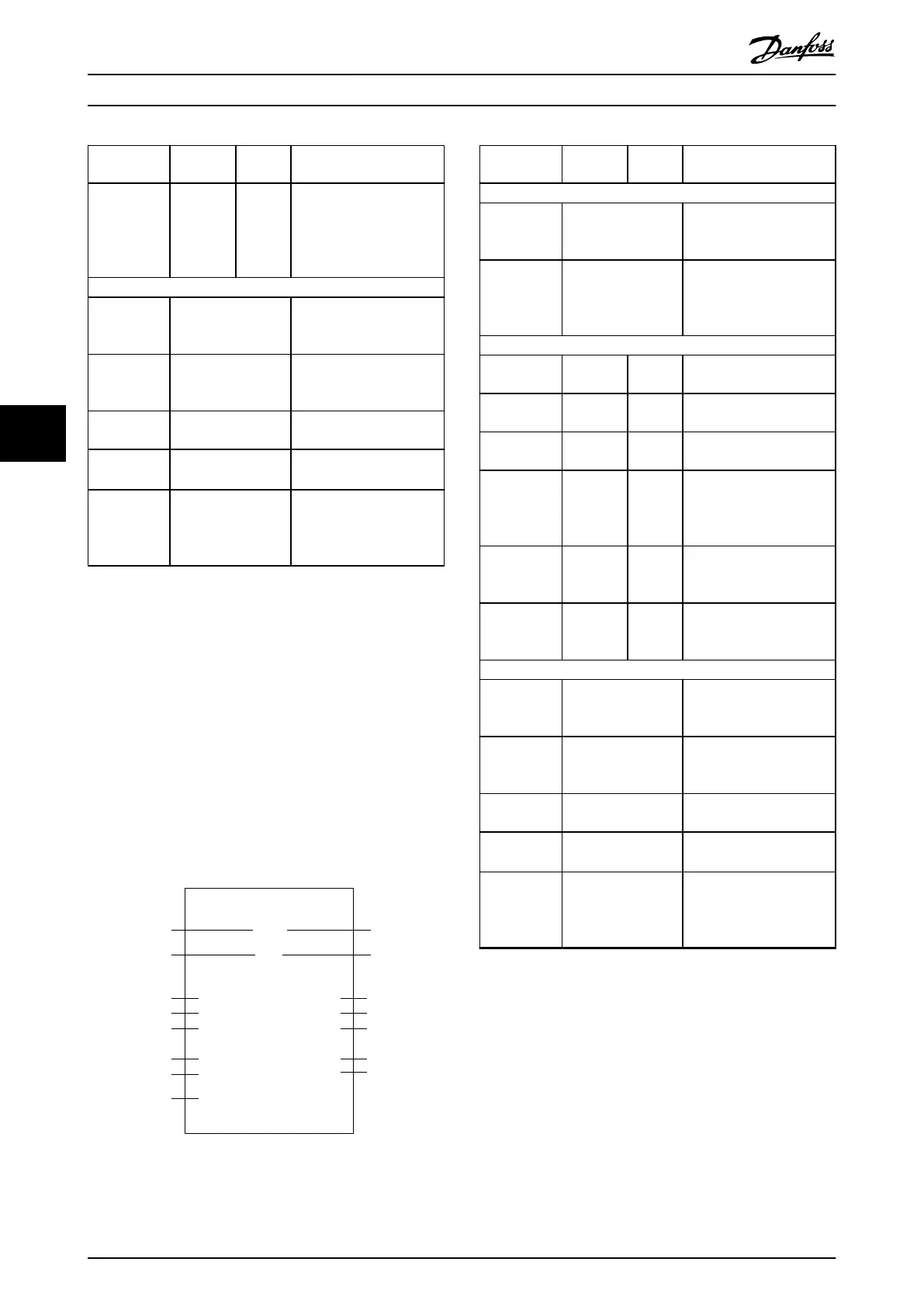
MC_GearIn_ISD51x
Master
ExecuteBOOL
GUIDE_VALUE_-
REF_ISD51x
Slave
AXIS_REF_-
ISD51x
BOOLInGear
BOOL Busy
BOOLError
BOOL
DD_ERROR_-
ISD51x
ErrorInfo
Command
Aborted
INT RatioNumerator
INT RatioDenominator
DINT Velocity
AccelerationUDINT
DecelerationUDINT
130BE280.10
Illustration 6.69 MC_GearIn_ISD51x
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Master GUIDE_VALUE_REF_IS
D51x
Reference to the master
axis.
See Table 6.54.
Slave AXIS_REF_ISD51x Reference to the slave axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Start the gearing process
at rising edge.
RatioNum-
erator
INT 1 Gear ratio numerator.
RatioDeno-
minator
INT 1 Gear ratio denominator.
Velocity DINT 0 Maximum velocity used
during gearing in
procedure [user-dened
velocity unit].
Acceleration UDINT 0 Acceleration used for
gearing in [user-dened
acceleration unit].
Deceleration UDINT 0 Deceleration used for
gearing in [user-dened
acceleration unit].
VAR_OUTPUT
InGear BOOL Is TRUE if the set value
equals the commanded
value.
Busy BOOL The function block is not
nished and new output
values are to be expected.
CommandA-
borted
BOOL Command is aborted by
another command.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.48 MC_GearIn_ISD51x
6.5.5.10 MC_GearInPos_ISD51x
This function block commands a synchronized motion with
the master. It commands a gear ratio between the position
of the slave and the master axes from the synchronization
point onwards. Only values >0 are allowed for the inputs
Velocity, Acceleration, and Deceleration. The value 0 is not
allowed for the inputs RatioNumerator and RatioDeno-
minator.
The command is transferred and executed immediately.
Programming
VLT
®
Integrated Servo Drive ISD
®
510 System
210 Danfoss A/S © 01/2017 All rights reserved. MG36D102
6
6

 Loading...
Loading...







