7.16.2 Parameters 52-61 and 52-62: Inertia Measurement Parameters (0x200A)
These parameters can be used to limit the measurement process. If the values used are too small, the measurement cannot
be done and an error is issued (see chapter 7.16.1 Parameter 52-60: Measured Inertia (0x2009)).
Sub-index 01 contains the velocity used for the measurement in user-dened velocity units.
Sub-index 02 contains the acceleration torque for the inertia measurement given per thousand of rated torque.
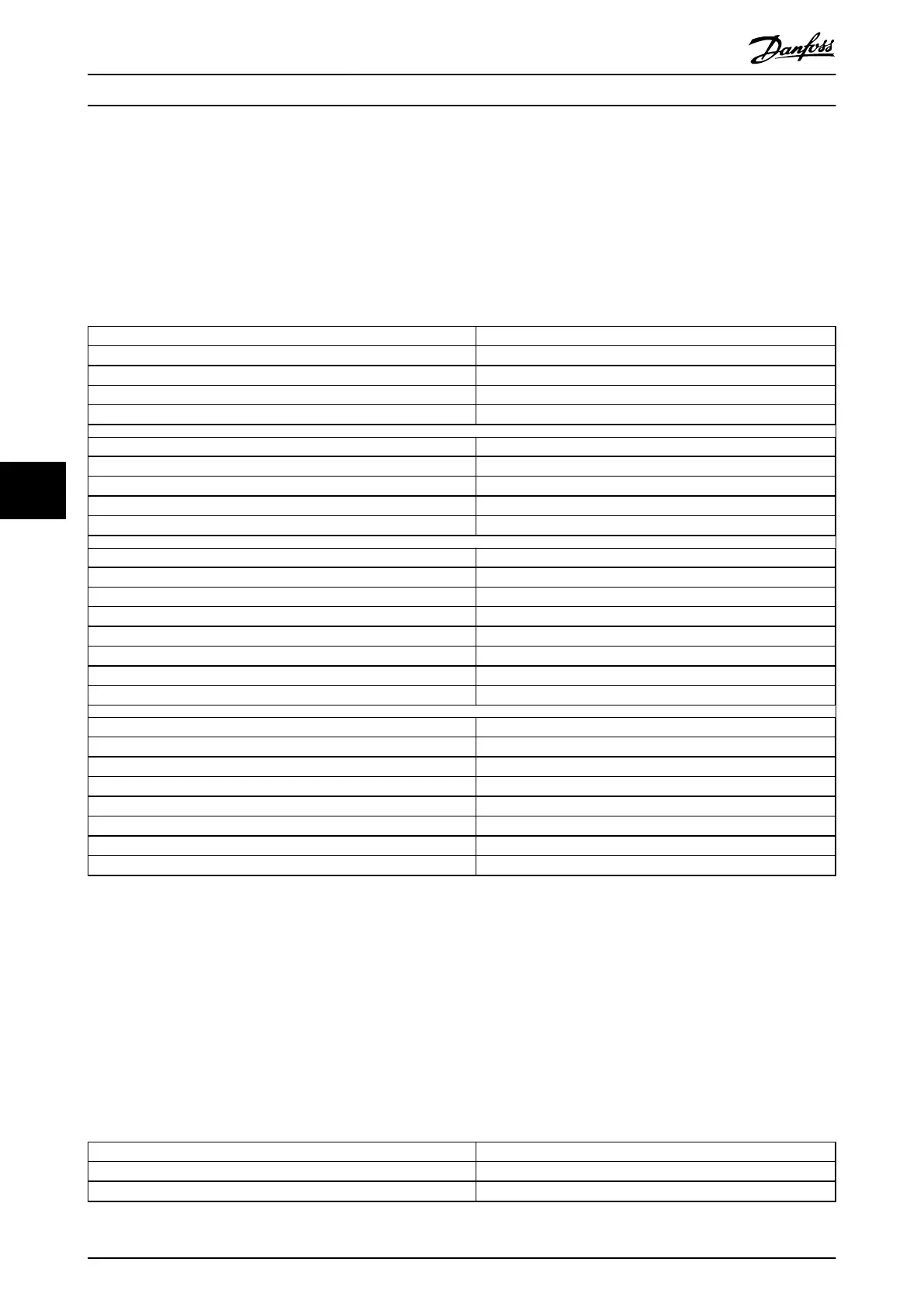
Attribute Value
Index 0x200A
Name Inertia measurement parameters
Object code Array
Data type RECORD
Sub-index 0x00
Description Value of highest sub-index
Access Read only
PDO mapping No
Default value 0x02
Sub-index 0x01
LCP parameter number 52-61
Description Inertia measurement velocity
Access Read/write
Data type UNSIGNED32
PDO mapping No
Value range UNSIGNED32
Default value 90% of maximum servo drive limit
Sub-index 0x02
LCP parameter number 52-62
Description Inertia measurement torque
Access Read/write
Data type UNSIGNED16
PDO mapping No
Value range UNSIGNED16
Default value 30% of maximum servo drive limit
Table 7.173 0x200A: Inertia Measurement Parameters
7.17
Digital CAM Switch Objects
7.17.1 Parameter: On Compensation (0x3840)
This parameter shows the compensation time with which the switching on is advanced or delayed. A negative value means
that the output changes before the switching position is reached.
The value can be changed while the digital CAM switching functionality is enabled. It has an immediate eect.
The value is given in milliseconds.
Attribute Value
Index 0x3840
LCP parameter number –
Servo Drive Parameter Descr...
VLT
®
Integrated Servo Drive ISD
®
510 System
314 Danfoss A/S © 01/2017 All rights reserved. MG36D102
77

 Loading...
Loading...







