Attribute Value
Default value 0
Table 7.75 0x607B: Position Range Limit
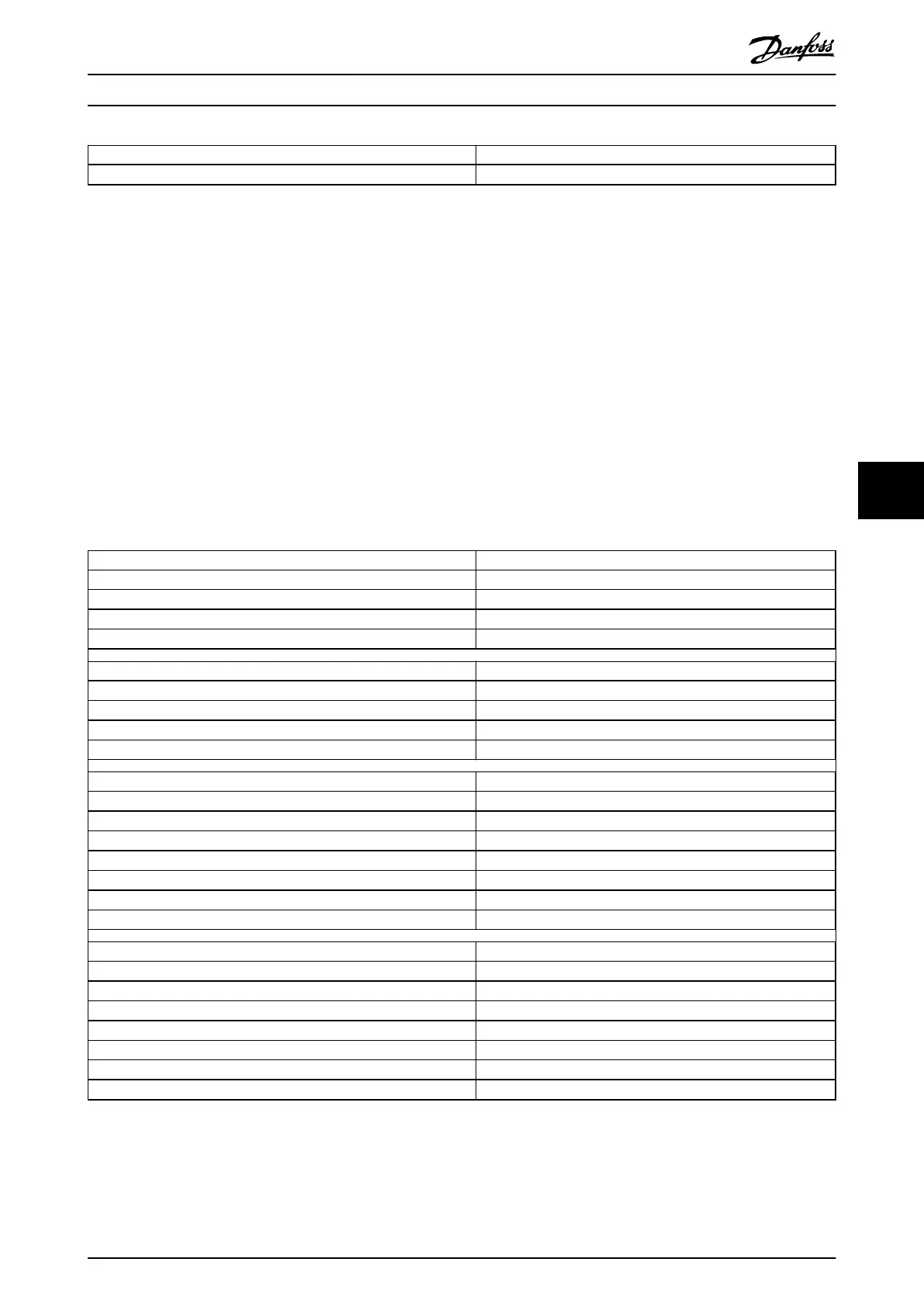
7.7.7 Parameters 50-32 and 50-33: Software Position Limit (0x607D)
This object is used to limit the maximum and minimum valid positions of the servo drive using software position limits. It is
also used for monitoring the position limits in all available modes of operation.
The limit positions are given in
user-dened position units. Supervision of software position limits requires a dened home
position. The Is homed bit in the Statusword must be set by successfully completing the homing procedure. Setting Min
position limit to MININT (default setting) disables the minimum position limit. Setting the Max position limit to MAXINT
(default setting) disables the maximum position limit.
When the servo drive is in position-controlled mode, it behaves dierently to all other modes of operation. In position-
controlled mode of operation, the servo drive does not pass over the Software position limit (see chapter 2.3.4.2 Software
Position Limit). The target position is limited to the software position limit. In all other modes of operation, the servo drive
immediately ramps down using the quick-stop deceleration when passing the software position limit. This means that the
servo drive always stops after the software position limit.
Attribute Value
Index 0x607D
Name Software position limit
Object code Array
Data type INTEGER32
Sub-index 0x00
Description Value of highest sub-index
Access Const
PDO mapping No
Default value 0x02
Sub-index 0x01
LCP parameter number 50-32
Description Minimum position limit
Access Read/write
Data type INTEGER32
PDO mapping Optional
Value range INTEGER32
Default value 0x7FFF FFFF
Sub-index 0x02
LCP parameter number 51-33
Description Maximum position limit
Access Read/write
Data type INTEGER32
PDO mapping Optional
Value range INTEGER32
Default value 0x8000 0000
Table 7.76 0x607D: Software Position Limit
Servo Drive Parameter Descr... Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 263
7 7

 Loading...
Loading...







