The Target reached bit in the Statusword remains as 0 until all setpoints are processed.
The Buered setpoint is not available as an object for readout.
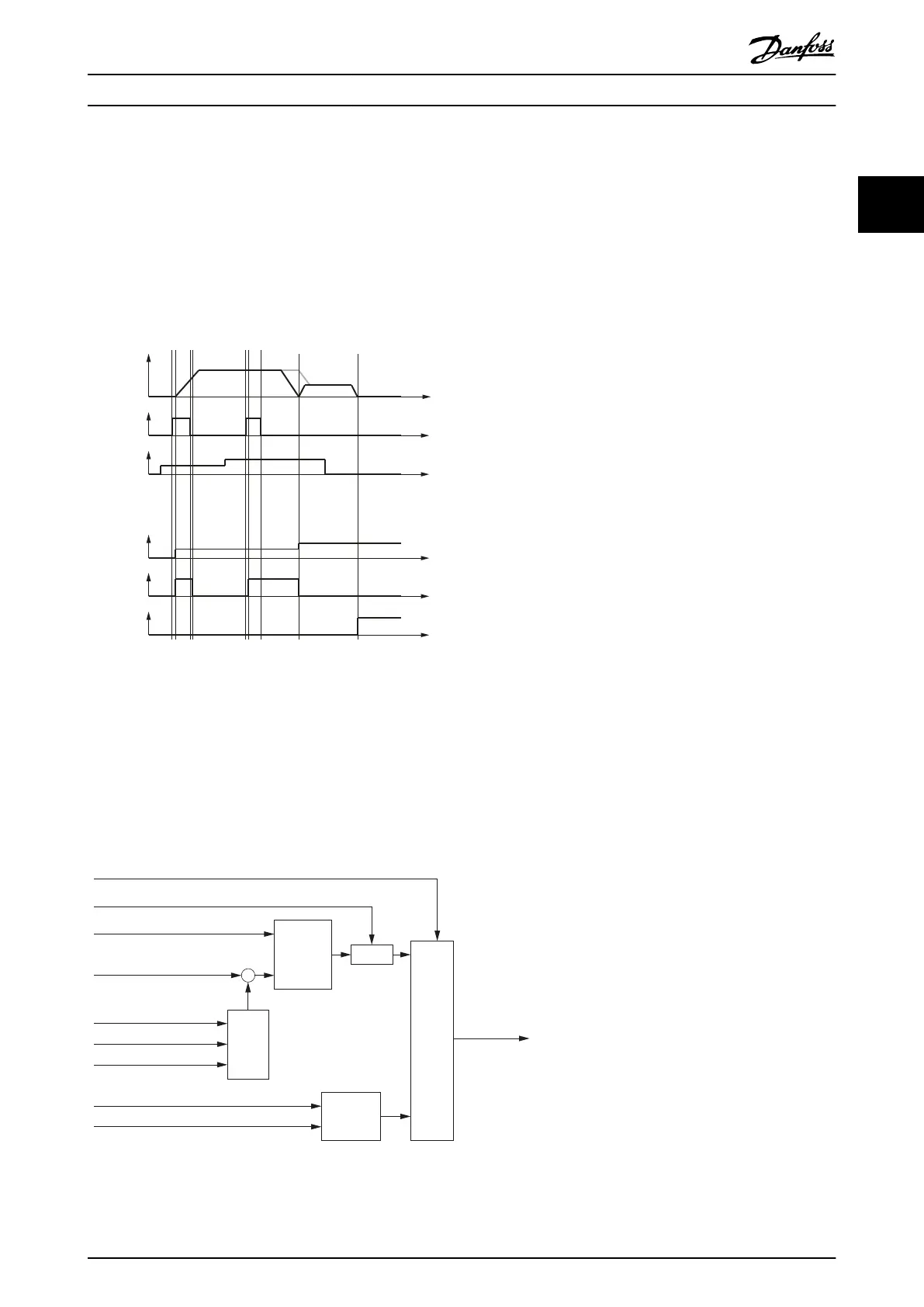
When a setpoint is in progress and a new setpoint is set to start afterwards (New setpoint bit is set to 0), the new setpoint is
only processed after the previous setpoint has been reached. The handshaking procedure shown in Illustration 2.16 is used
for this scenario. The additional gray line in the graph Actual speed shows the actual speed if the Change of setpoint bit (bit
9 in the Controlword) is set to 1.
Actual
speed
New
setpoint
(bit 4)
Target
position
(setpoint)
Current target
position
processed
Setpoint
acknowledge
(bit 12)
Target
reached
(bit 10)
t
t
t
t
t
t
Illustration 2.16 Inuence of Change of Setpoint Bit in Prole
Position Mode
Position reached function
The position reached function oers the possibility to dene a range around a position demand value to be regarded as
valid. If the position of the servo drive is within this area for a specied time (the position window time), the related control
bit Target reached (bit 10) in the Statusword is set to 1.
Window
comparator
Limit
function
Comparator
Selector
Timer
Target reached option code (0x2054)
Position window time (0x6068)
Position window (0x6067)
Drive position (0x2022)
Position range (0x607B)
Target reached
Software position (0x607D)
Target position (0x607A)
Position demand value (0x6062)
Target position (0x607A)
–
Illustration 2.17 Position Reached – Functional Overview
Servo Drive Operation Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 29
2 2

 Loading...
Loading...







