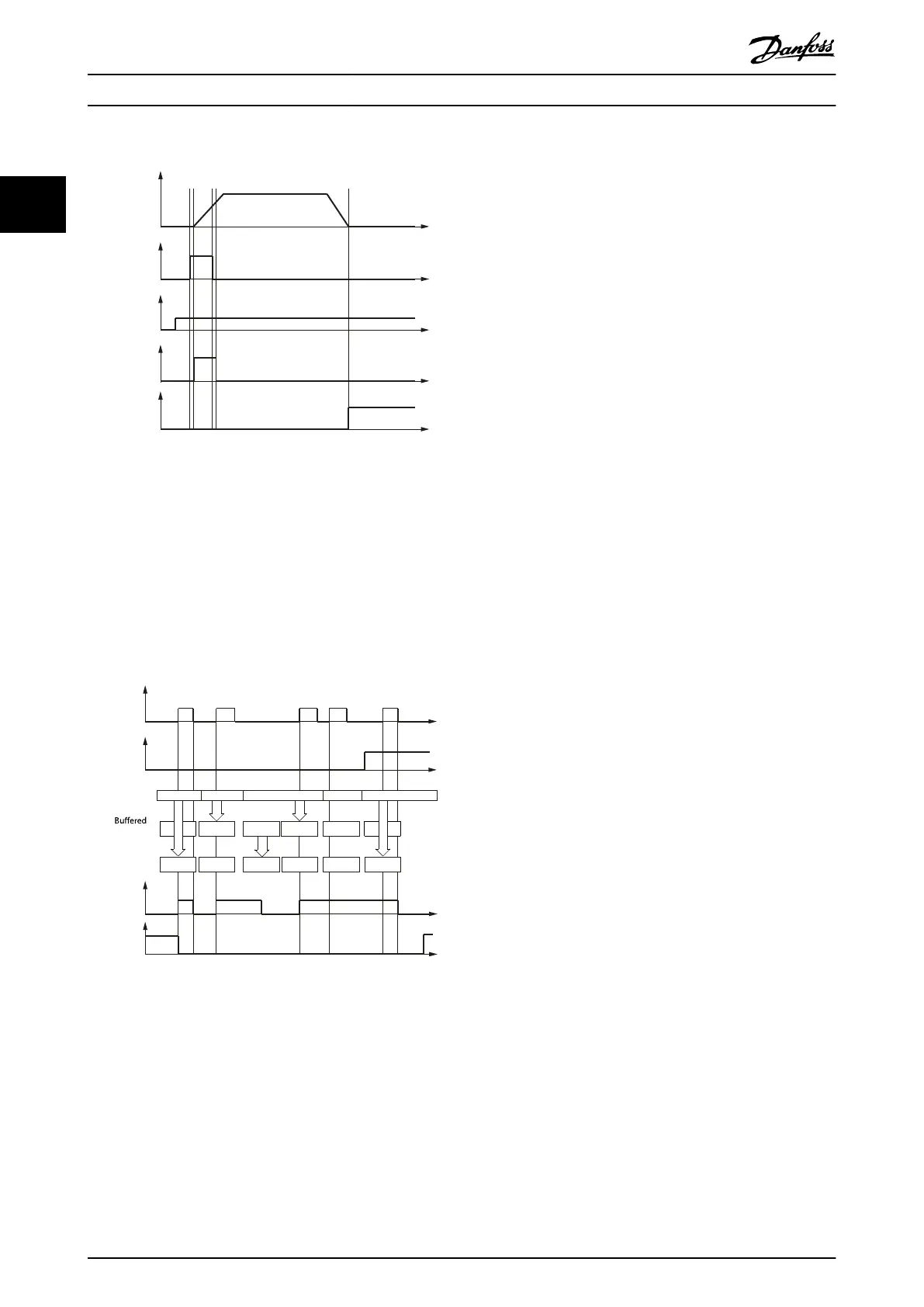
Actual
speed
New
setpoint
(bit 4)
Target
position
(setpoint)
Setpoint
acknowledge
(bit 12)
Target
reached
(bit 10)
t
t
t
t
t
Illustration 2.14 Handshaking Procedure for Setpoint
Activation
The servo drive supports 2 setpoints: a setpoint that is currently being processed, and a buered setpoint. If a setpoint is
still in progress (has not been reached) and a new setpoint is activated by the new setpoint bit in the Controlword, 2
methods of handling are supported. The new setpoint is activated immediately if the Change set immediately bit of the
Controlword is set to 1. If the Change set immediately bit of Controlword is set to 0, the currently active setpoint is nished
rst and the new setpoint is started afterwards.
A A B B B E
B
B C
C
C D
New
setpoint
(bit 4)
Change set
immediately
(bit 5)
Setpoint
acknowledge
(bit 12)
Target
reached
(bit 10)
Setpoint
setpoint
Processed
setpoint
1 2 3 4 5
t
t
t
t
130BF171.10
A
E
Illustration 2.15 Setpoint Handling for 2 Setpoints
New setpoints are buered as long as a free setpoint buer is available in the axis. If no setpoint is in progress, the new
setpoint becomes active immediately (case 1 in Illustration 2.15). If a setpoint is in progress, the new setpoint is stored in the
setpoint buer (cases 2 and 3 in Illustration 2.15).
If all setpoint buers are busy (Setpoint acknowledge bit is set to 1), the reaction depends on the Change set immediately bit.
If the Change set immediately bit is set to 0, the new setpoint is rejected (case 4 in Illustration 2.15). If the Change set
immediately bit is set to 1, the new setpoint is processed immediately. The currently running setpoint prole is discarded
(case 5 in Illustration 2.15).
Servo Drive Operation
VLT
®
Integrated Servo Drive ISD
®
510 System
28 Danfoss A/S © 01/2017 All rights reserved. MG36D102
22

 Loading...
Loading...







