6.5.5.4 MC_MoveAbsolute_ISD51x
This function block commands a controlled motion to a
specied absolute position. If no further actions are
pending, this action completes with velocity 0. The
Direction mcShortestWay_ISD51x uses a trajectory that takes
the shortest route. The direction is based on the current
position when the command is issued.
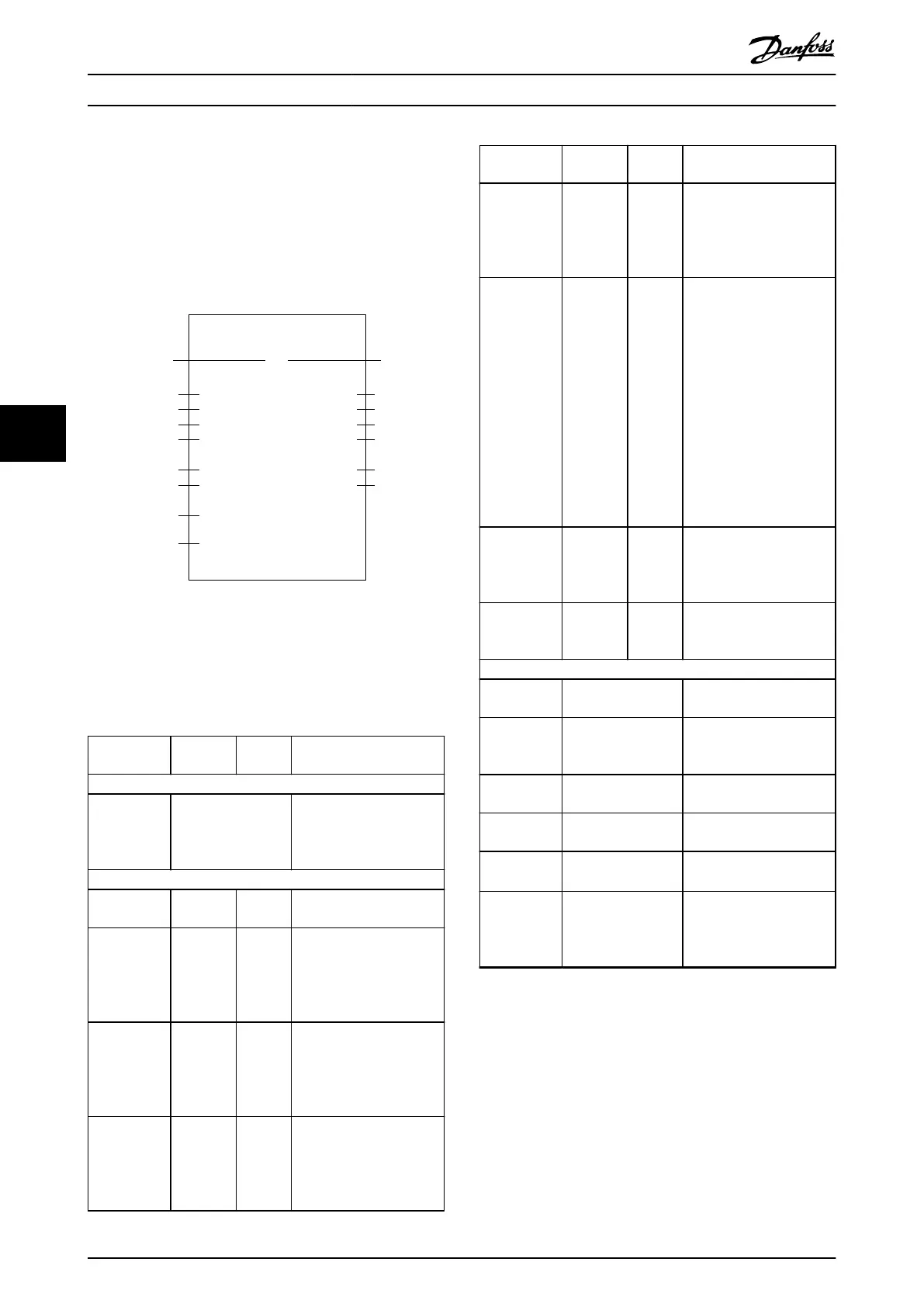
MC_MoveAbsolute_ISD51x
ExecuteBOOL
Axis
AXIS_REF_-
ISD51x
BOOLBusy
BOOLDone
BOOLCommand
Aborted
BOOL
BOOLError
DD_ERROR_-
ISD51x
ErrorInfo
Active
PositionDINT
AccelerationUDINT
DecelerationUDINT
DirectionMC_DIRECTION_-
ISD51x
BuerModeMC_BUFFER_-
MODE_ISD51x
TorqueLimitUINT
VelocityDINT
130BE284.10
Illustration 6.61 MC_MoveAbsolute_ISD51x
Only positive values are allowed for the inputs Velocity,
Acceleration, and Deceleration.
The command is transferred immediately and, if in
aborting buer mode, is also executed immediately.
Variable
name
Data type Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Execute BOOL FALSE Start the motion at rising
edge.
Position DINT 0 Commanded position for
motion [user-dened
position unit]. The value
can be positive or
negative.
Velocity DINT 0 Value of maximum
velocity, that is not
necessarily reached [user-
dened velocity unit]. Only
values >0 are allowed.
Acceleration UDINT 0 Value of acceleration
(increasing energy of the
motor) [user-dened
acceleration unit]. Only
values >0 are allowed.
Variable
name
Data type Default
value
Description
Deceleration UDINT 0 Value of the deceleration
(decreasing energy of the
motor) [user-dened
acceleration unit]. Only
values >0 are allowed.
Direction MC_DIREC
TION_ISD5
1x
mcShor-
testWay_
ISD51x
Inuences the trajectory
calculation. See Table 6.42
for available values. The
following directions are
supported:
•
mcCurrentDir-
ection_ISD51x
•
mcNegativeDir-
ection_ISD51x
•
mcPositiveDir-
ection_ISD51x
•
mcShortestWay_ISD51x
BuerMode MC_BUFFE
R_MODE_I
SD51x
mcAbort
ing_ISD5
1x
Denes the chronological
sequence of the function
block. See Table 6.43 for
available values.
TorqueLimit UINT 0xFFFF Maximum torque used
during this motion [per
thousand of rated torque].
VAR_OUTPUT
Done BOOL Commanded position
nally reached.
Busy BOOL The function block is not
nished and new output
values are to be expected.
Active BOOL The function block has
control on the axis.
Command
Aborted
BOOL Command is aborted by
another command.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Table 6.41 MC_MoveAbsolute_ISD51x
Programming
VLT
®
Integrated Servo Drive ISD
®
510 System
202 Danfoss A/S © 01/2017 All rights reserved. MG36D102
6
6

 Loading...
Loading...







