Bit 15 Bit 7 Bit 6 Denition
0 0 0 Normal positioning similar to linear axis; If reaching or exceeding the position range
limits (0x607B), the input value automatically wraps to the other end of the range.
Positioning can be relative or absolute.
Movement greater than a modulo value is only possible with this bit combination.
0 0 1 Positioning only in negative direction; If the target position is higher than the actual
position, then the axis moves over the minimum position limit (0x607B, sub-index 01)
to the target position.
0 1 0 Positioning only in positive direction; If the target position is lower than the actual
position, then the axis moves over the maximum position limit (0x607B, sub-index 02)
to the target position.
0 1 1 Positioning with the shortest way to the target position.
If the distance in both directions is the same, the axis moves in positive direction.
1 0 0 Positioning in last direction; Similar to positioning, however the direction (negative or
positive) depends on the last known positioning direction. If no previous direction is
available, then positive direction is used.
1 0 1 Reserved.
1 1 x Reserved.
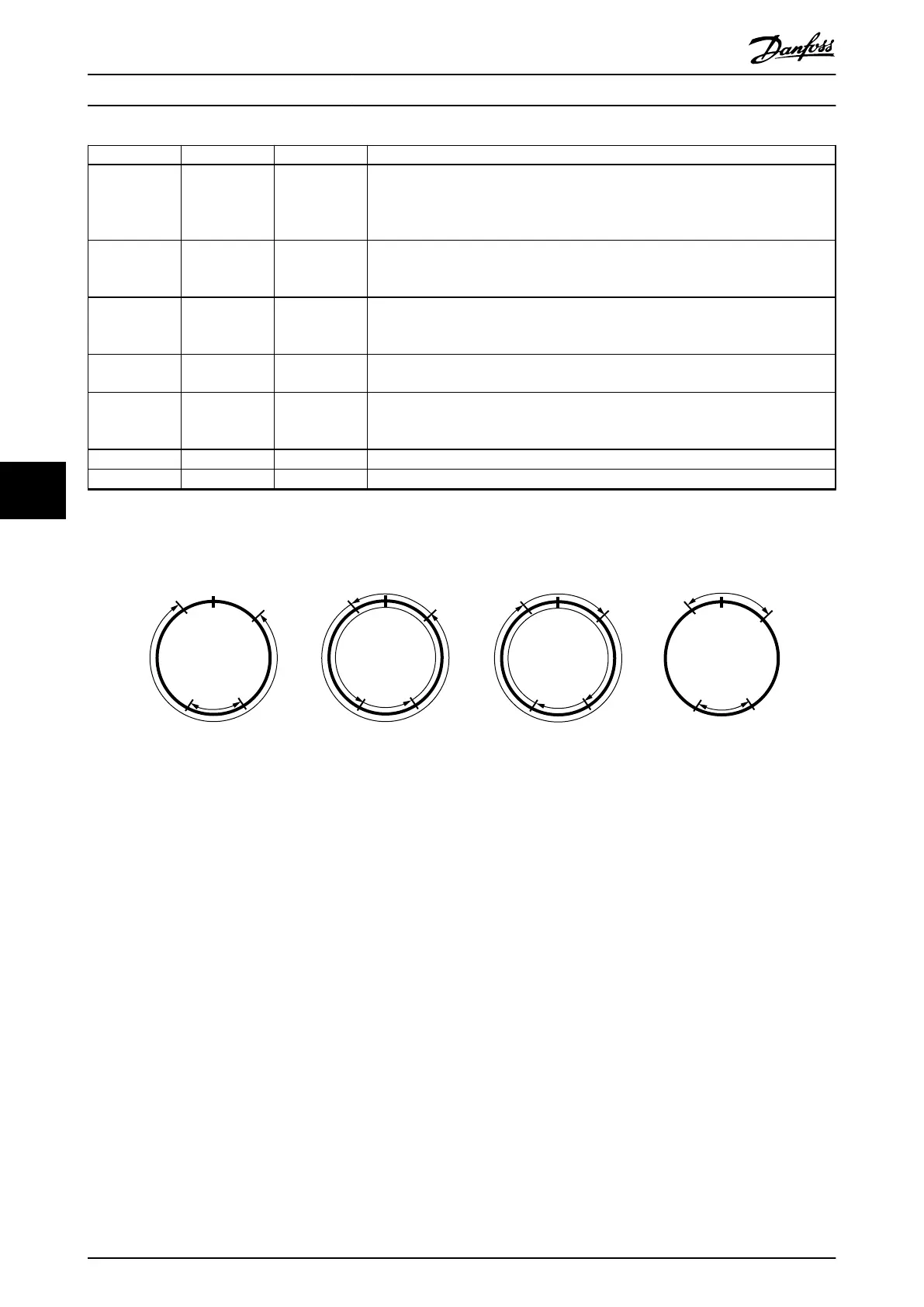
Table 7.102 Denition of Bits 6, 7, and 15
130BF215.10
normal
(similar to linear axis)
only negative
direction
only positive
direction
optimized
(shortest way)
Bit7 Bit6
0 0
Bit7 Bit6
0 1
Bit7 Bit6
1 0
Bit7 Bit6
1 1
210 150
210 150
210 150
210 150
360=0
330
50
360=0
330
50
360=0
330
50
360=0
330
50
Illustration 7.3 Possible Rotary Axis Movements
If rado bits are set to 0 (normal), the servo drive is able to turn >1 revolution. This applies if object 0x607B is set to 0° and
360°, and the target positon is above 1 revolution.
For the options Only negative direction, Only positive direction, and Last direction, a movement bigger than the modulo value
is not possible. If the value of the target position is bigger than the modulo value, then the modulo operation is used to
determine the position within the range. This position is then used as the target position (for example, if the target position
is set to 410°, then the actual target position is 50°). The direction to reach this position is then determined by the rado
bits.
If rado bits are set to 1 (optimized), the shortest way to the new target position must be found. In this case, the servo drive
must never turn more than 180°, even if the distance between target position is >1 revolution. However, it is allowed to
cross the maximum/minimum limits of object 0x607B to reach the target position.
Servo Drive Parameter Descr...
VLT
®
Integrated Servo Drive ISD
®
510 System
276 Danfoss A/S © 01/2017 All rights reserved. MG36D102
77

 Loading...
Loading...







