Attribute
Mandatory/
optional
(+default
value)
Value
range/
allowed
values
Description
default O; default =
FALSE
TRUE/FALSE Denes if this segment is
the default segment for
the referenced preceding
node.
This attribute is not
necessary if only 1
segment has this
precNode as preceding
node.
If >1 segment has this
precNode as preceding
node, and none of them
claims to be the default
one, the segment with
the lowest segment ID is
used.
If >1 segment claims to
be the default segment of
a specied precNode, a
parsing error is issued.
startAction O; default =
no action
0, 1, or
more
existing
action IDs
Denes if 1 or multiple
actions are attached to
the beginning of this
segment. This attribute is
optional. If it is not
present, no action is
assigned to the beginning
of this segment. To dene
multiple actions, all
actionIDs must be listed
inside the attribute,
separated by a white
space. If a non-existing
action ID is used, an error
is issued during parsing.
endAction O; default =
no action
0, 1, or
more
existing
action IDs
Denes if 1 or multiple
actions are attached to
the end of this segment.
This attribute is optional.
If it is not present, no
action is assigned to the
end of this segment. To
dene multiple actions, all
actionIDs must be listed
inside the attribute,
separated by a white
space. If a non-existing
action ID is used, an error
is issued during parsing.
Table 2.17 Common Attributes for all GuideSegments
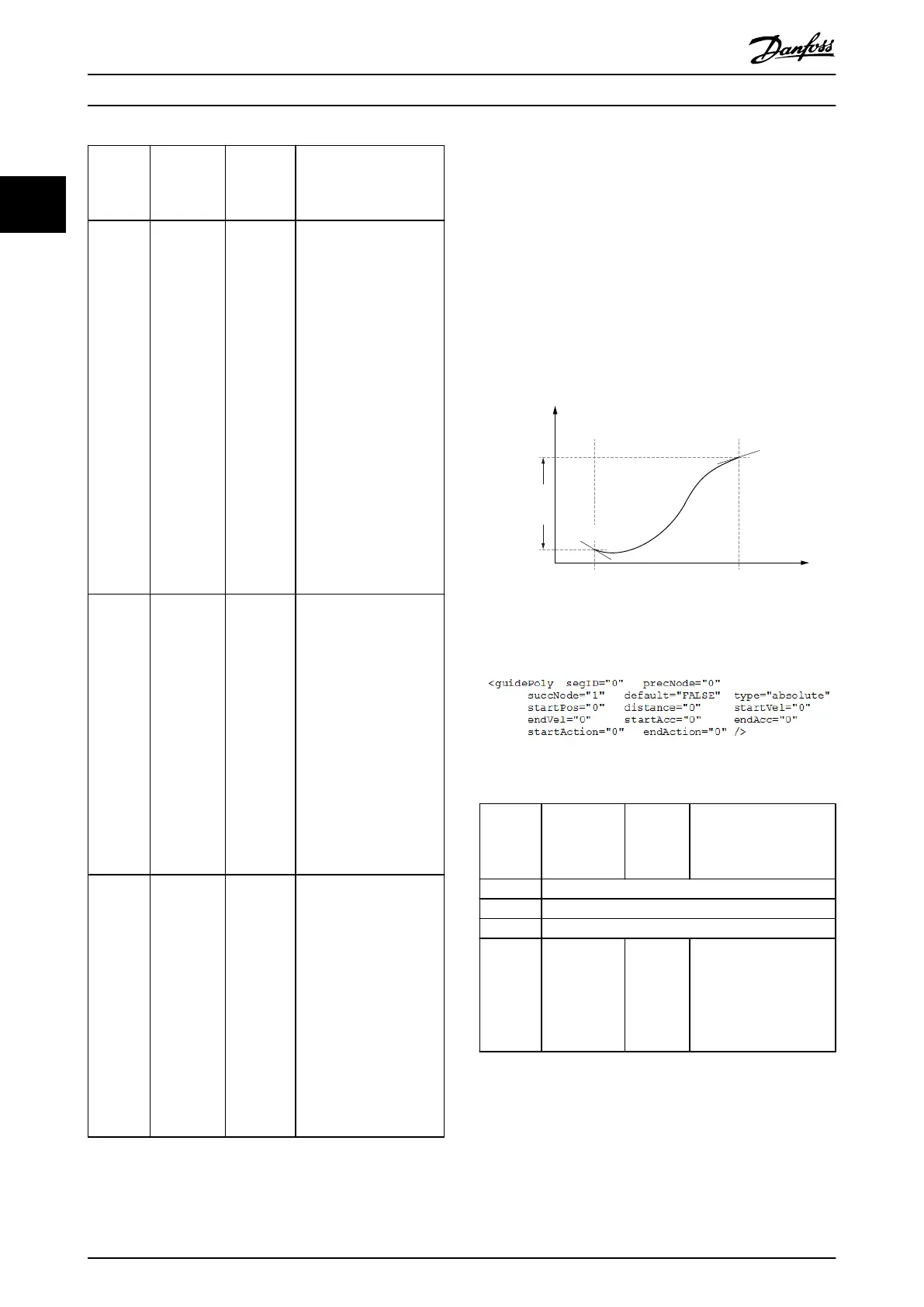
GuidePoly:
The GuidePoly denes a movement that relates the rotor
angle of the axis with the guide value. Position, velocity,
and acceleration at the preceding and the succeeding
node can be selected without restrictions. It is therefore
possible to realize many movements already with a single
GuidePoly.
Complex movements can be combined by a number of
GuidePolys. When combining GuidePolys, the end velocity
of the segment and the start velocity of the next segment
must match, otherwise a jump in velocity occurs. It is
possible to dene absolute and relative movements.
130BF291.10
Guide
value
Rotor angle
of axis
distance
startPos
endVel
startVel
succNodeprecNode
Illustration 2.83 GuidePoly
Illustration 2.84 Start/Endpoint Representation
Attribute
Mandatory/
optional
(+default
value)
Value
range/
allowed
values
Description
segID Same as in Table 2.17.
precNode Same as in Table 2.17.
succNode Same as in Table 2.17.
type M Absolute/
relative
Denes if the segment is
executed at an absolute
slave position or if the
segment is executed
relative to the previous
position.
Servo Drive Operation
VLT
®
Integrated Servo Drive ISD
®
510 System
56 Danfoss A/S © 01/2017 All rights reserved. MG36D102
22

 Loading...
Loading...







