MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
118
7 Control
No. Action
--
-Theteachingandcalculationarethusfinished.
-Thepositionsourceusedhasbeenstoredinternally.
-Thecompensationtableisavailableforuseimmediately.
11 Stopcontrol
12
Startthecompensation:P 382[0] - CON_TCoggComp > 0
Afterthis,theq-currentfeedforwardcontrolbecomesactivewhenthecontrol
isrestarted.
13
Savedevicedata.
-Thepositionsourceusedbytheteachingisalsosavedhere.Itwilllaterbe
usedforthecompensationonceagaininexactlythesamemanner.
Table 7.4: Overall procedure for detent torque compensation
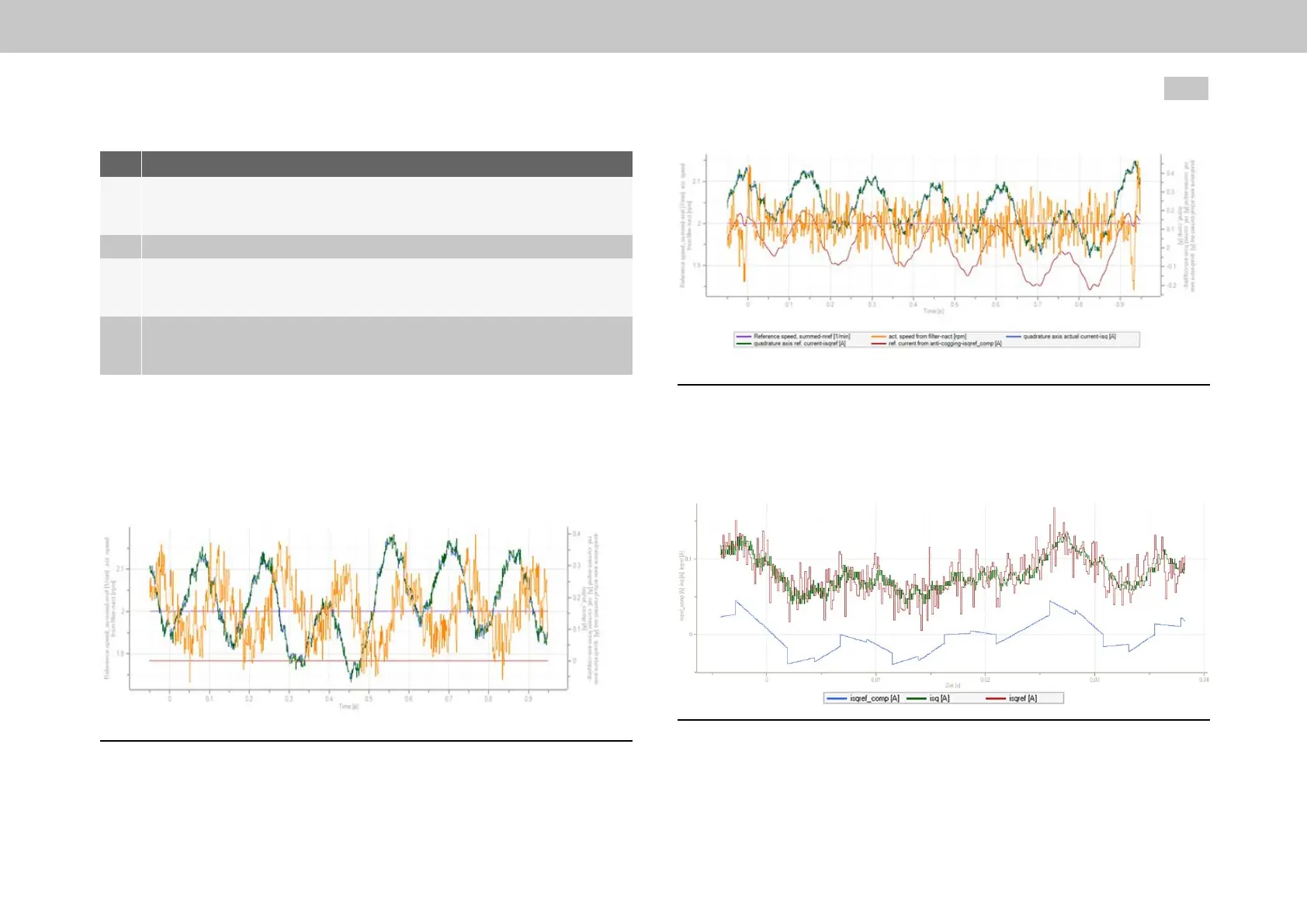
7.3.4.3.1Scoperecording:speed‘before'and‘after'
A significant improvement in the speed progression is noticeable in the ‘yellow’
scope signal (13): nact [rpm]: cur. speed from filter.
Fig. 7.11: Before detent torque compensation (without)
Fig. 7.12: After enabling detent torque compensation (with) (please keep the Y axis
scaling in mind!)
Possiblemonitoringviascopesignal(69)isqref_comp[A]:ref.currentfromanti-cog-
ging-->in‘blue'here
Fig. 7.13: Monitoring with isqref_comp (69)

 Loading...
Loading...