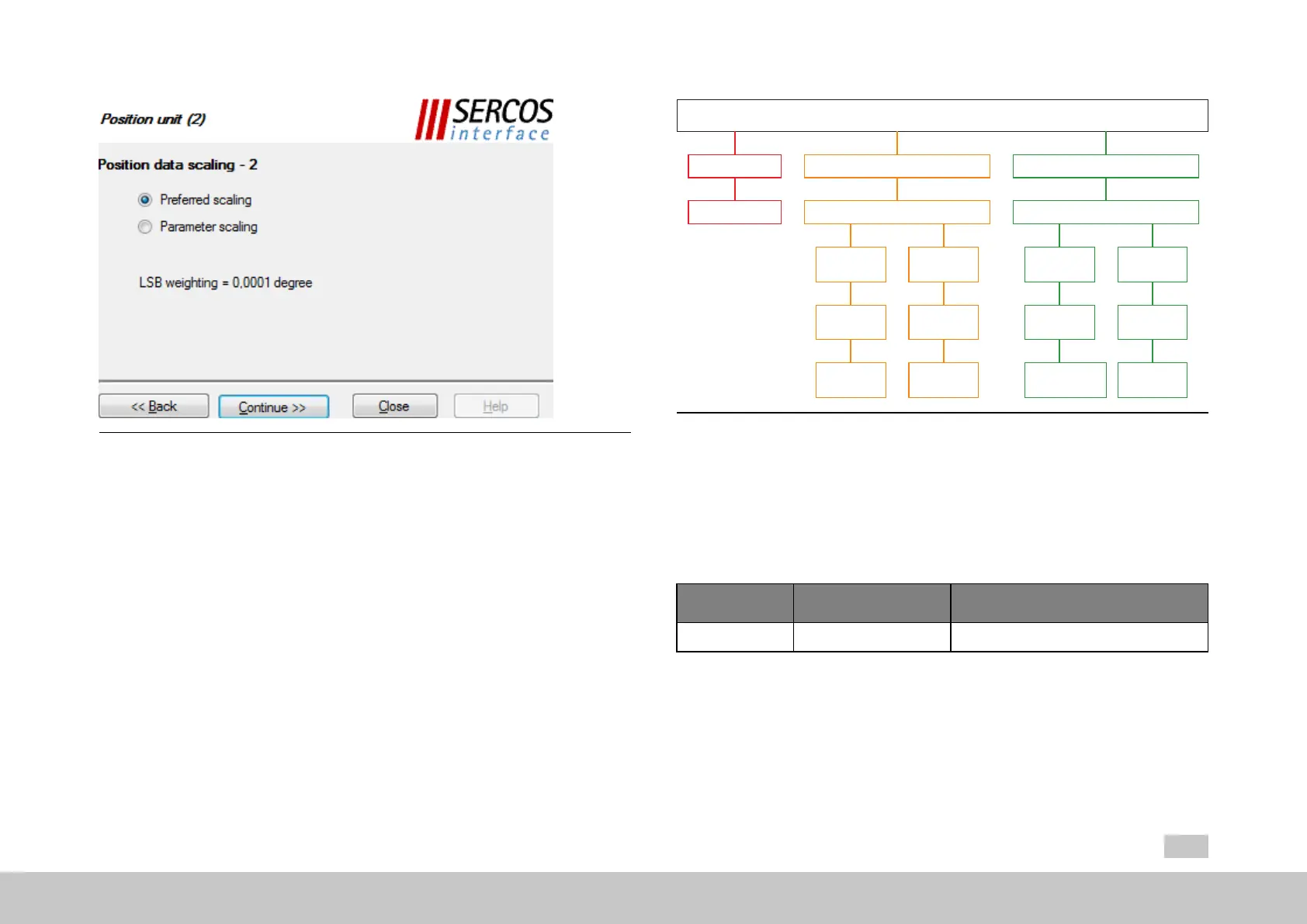
Fig. 8.12: “Standardization profile - SERCOS- Position unit (2)” dialog box
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
170
8 Motion profile
Weighting of position data
off
linearly mode
rotary mode
Load / Motor
Load / Motor Load / Motor
Preferentioal
translational
weighting
Parameter-
weighting
MeterMeter Grad Grad
LSB = 10 E-7 m LSB = variabel
Resolution 360000
LSB = 0,0001 Grad
LSB = variabel
Preferentioal
translational
weighting
Parameter-
weighting
Fig. 8.13: Position data weighting method
Position polarity
The polarity of the position data can be inverted according to the application. An
increasing actual position value indicates clockwise rotation (looking at the motor
shaft).
Linear weighting
Unit Weighting factor Preferential weighting (LSB)
m 1 E
-7
Table 8.6: Weighting for linear motion (default setting)
The “Position data weighting method" figure below shows the structure with which
the acceleration is scaled using the SERCOS wizard. A distinction must be made
between linear (translational) and rotary weighting within this context.

 Loading...
Loading...