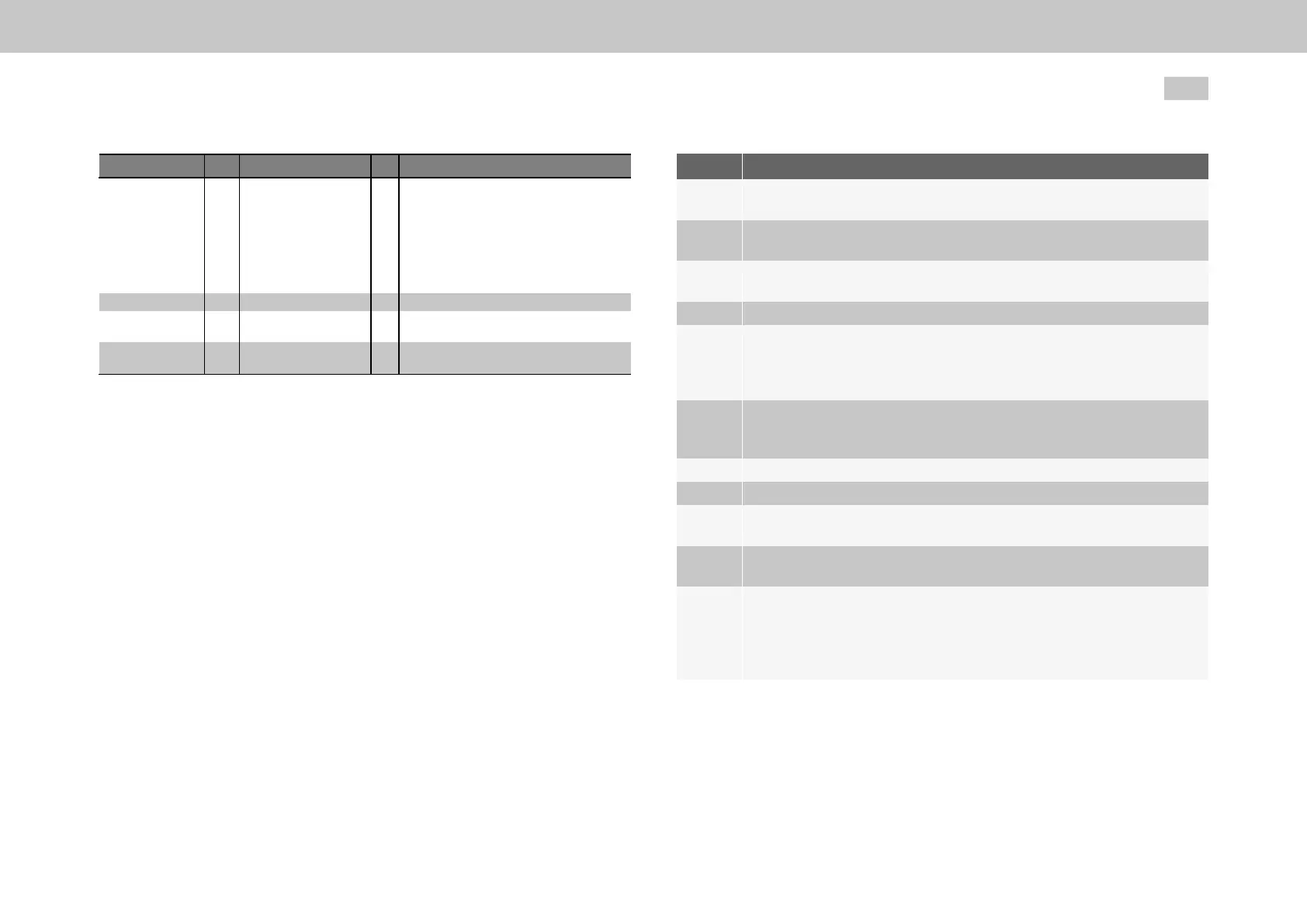
P No. Index Name / Setting Unit Description
593 0 ENC_ACOR_PosDelta Interpolationpointpitch:Thepositionsatwhich
thecorrectioninterpolationpointsareplottedare
definedviaparametersP 0593 ENC_ACOR_
PosDeltaInterpolationpointpitchandP 0591
ENC_ACOR_PosStartStartposition.Between
thecorrectioninterpolationpoints,the
correctionvaluesarecalculatedbycubicspline
interpolation.
594 0 ENC_ACOR_Val Actualposition
595 0-250 ENC_ACOR_VnegTab Valuesofthecorrectiontablefornegative
directionofrotationinuserunits.
596 0-250 ENC_ACOR_VposTab Valuesofthecorrectiontableforpositive
directionofrotationinuserunits.
Table 6.34: Axis correction parameters (continue)
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
98
6 Encoder
Step Action
1.
UseP 530 - ENC_Encoder1SeltoselectthechannelforSERCOS:1.
Encoder
2.
UseP 531 - ENC_Encoder2SeltoselectthechannelforSERCOS:2.
Encoder
3.
Selectionoftheencoderwhoseactualpositionvalueistobechanged,
withP 590 - ENC_ACOR_Sel
4. EnterinterpolationpointpitchinP 593 - ENC_ACOR_PosDelta
5.
Thecorrectionvaluesaredeterminedusingareferencemeasurement
system(e.g.laserinterferometer).Theinterpolationpointsforthevarious
directionswithinthedesiredcorrectionrangeareapproachedoneafter
anotherandthecorrespondingpositionerrorismeasured.
6.
Theinterpolationpoint-specificcorrectionvaluesareenteredmanuallyin
tablesP 595 - ENC_ACOR_VnegTab(neg.direction)andP 596 - ENC_
ACOR_VposTab(pos.direction).
7. Savevalues
8. Restartthedevice
9.
P 592 - ENC_ACOR_PosEndnowshowsthepositionendvalueofthe
correctionrange.
10.
Startcontrol(inpositioncontrolexecutehoming)andthenmovetoany
position.
11.
ThemomentarycorrectionvalueiswrittentoP 594 - ENC_ACOR_Val.
Thisvalueissubtractedfromtheapproachedpositionvalue.Thisapplies
toallpositions.Endposition=interpolationpointpitchmultipliedby
numberofinterpolationpoints(tablevalues)+startposition(onlyifstart
position≠0).
Table 6.35: Axis correction procedure

 Loading...
Loading...