Interfacingperipheralequipment
•WheninFreerunningmode,theMasterpingsasfastaspossible,raisingitsRTS
signalatstartofpingandloweritatendofping.TheSlavewillbetriggeredby
theraisedRTSsignalasbefore.
•However,ifnot
inFreerunningmode,theMasterwillwaitforitsCTSsignalto
behigh(“readytoping”acknowledgefromtheSlave)beforeitstartsanewping
sequence.
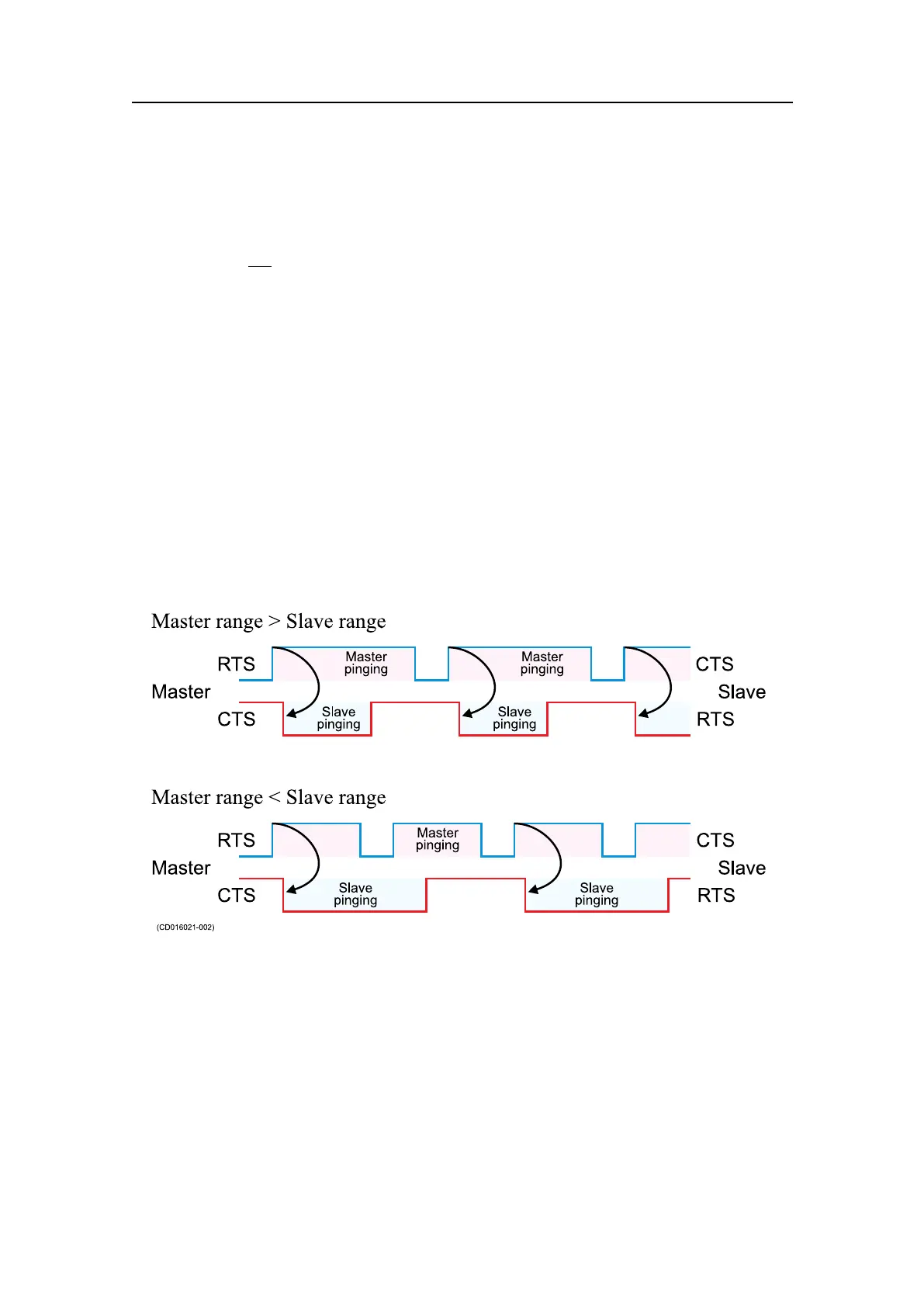
TheMastercontrolstheRTSandreceivesacknowledgeontheCTS.
TheSlaveiscontrolledbytheCTSpinandsendsacknowledgeontheRTSpin.Sothe
RTSontheMastersideisconnectedtotheCTSontheSlaveside,andtheCTSonthe
MastersideisconnectedtotheRTSontheSlaveside.
Synchronisationsequences
Whenconnectingtwosystemsbasedonthissynchronisationconcept,onesetupas
aMasterandtheotherasaSlave,wehavethefollowingpossiblesynchronisation
sequences.
Synchronizationtiming:Masterin“Freerunning”mode
381293/A
139