SimradSU90
Tip
Onceyouclosetheparameterdialog,thechosencommunicationportwill
“disappear”.Ifyoulaterneedtochangecommunicationparameters,youmustrst
chooseinternalsensor(selectTransceiver1)inthemenu,andthenrestarttheSU90.
7ClickClosetoexittheSensorCongparameterdialog.
8Locatethe0degreestransducermark.
Notethattheheadingofthemotionreferenceunitintheillustrationassumesthatit
hasbeenmountedwith0degrees(+R)pointingtowardsthebow.
9Estimatetheapproximateoffsetangle(0to360degrees)clockwisefromthe0
degreestransducermarktothe0degreesmotionreferenceunit.
10EntertheoffsetangleasdescribedinEnteringthestabilisationoffsetangleinto
theSU90onpage146.
11OpentheSetupmenu,andclickTesttoopentheSystemtestmenu.
12OntheInstallationmenu,clickI/OSetup→Sensors→Stabilization→External.
13Verifythattheinformationfromthemotionreferenceunitisshowninthetwo
rollandpitch‘buttons’.
14Comparetherollandpitchvaluesinthetwo‘buttons’withthevaluesfromthe
internalsensorthatyouwrotedown.
15AdjusttheoffsetparametersintheSensorCongparameterdialogsothatthevalues
inthetwobuttonscorrespondtothevaluesthatyouwrotedown.
16ClickClosetoexittheSensorCongparameterdialog.
17Ifyouneedorwishtomonitorthedetaileddatatrafconthecommunicationline,
observethededicatedproceduresinsectionMonitoringthetrafconaserialor
Ethernetlineonpage132.
EnteringthestabilisationoffsetangleintotheSU90
Purpose
Oncetheoffsetanglehasbeenmeasured,itmustbeentered
intotheSU90setupparameters.
Procedure
1OpentheSetupmenu.
2ClicktheTestbuttontoopentheSystemtestmenu.
3ClicktheInstallationMenubutton,andobservethemenu
thatappearsonthetopofthedisplay.
4SelectInstallation→Installation→Alignment.
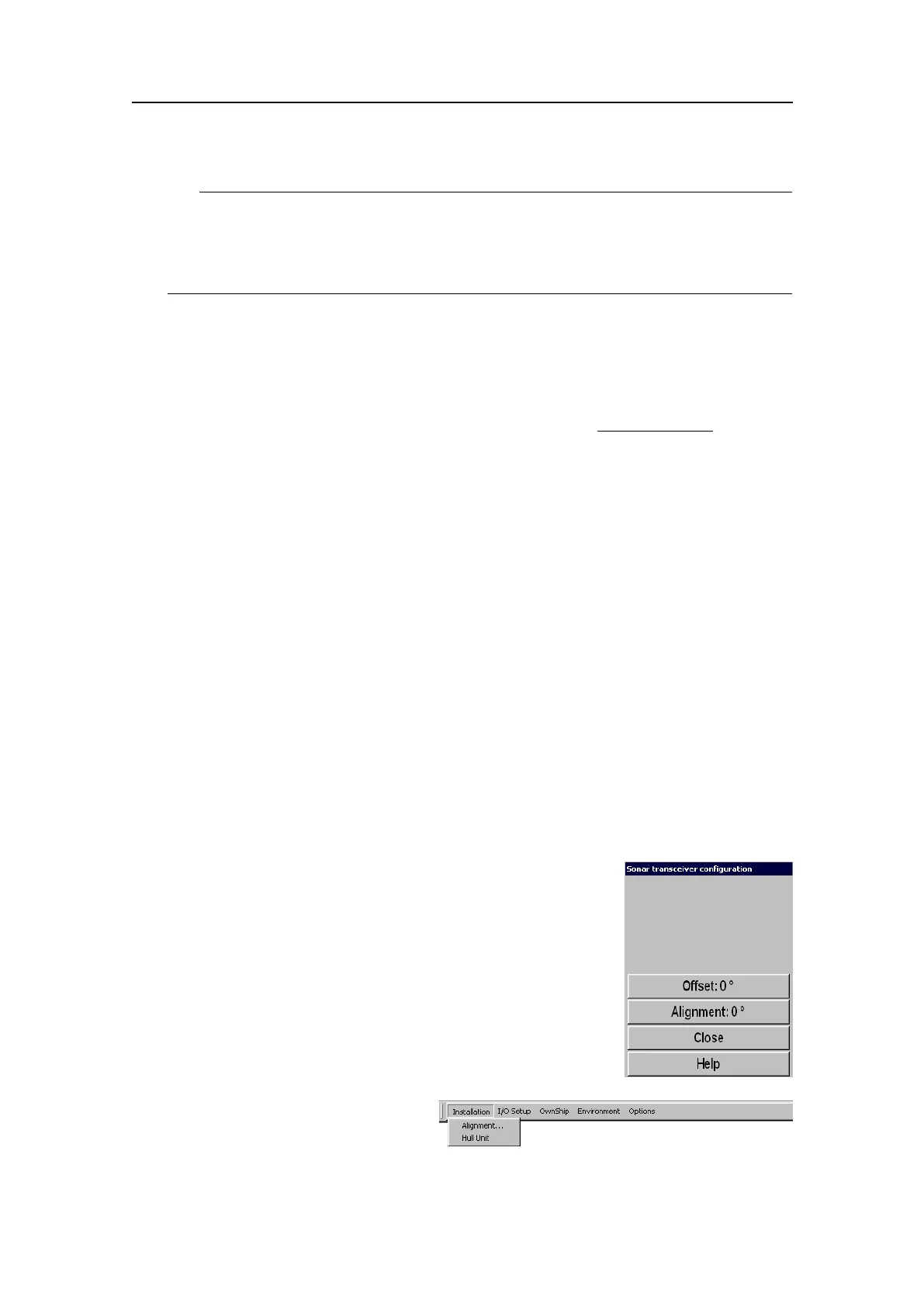
5ObservethattheSonar
transceiverconguration
parameterdialogappearsat
thebottomofthemenueld.
146
381293/A