Brooks Automation 8. System Alignment
Part Number: 605914 Rev. B Overview
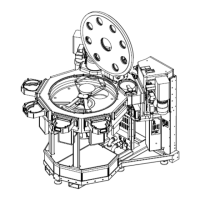
Alignment Overview
TypicalsystemalignmentstartswithsettingtheheightandlevelingtheMarathonExpressandthen
dockingtheProcessModule(s)totheMXsystem.Themajorstepsofthealignmentprocessare
detailedbelow.
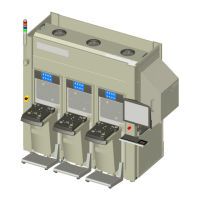
TheLoadPortModulesandtheProcessModule(s)canbealignedtotheWaferTransportPlane
(WTP)usingtherobotendeffectorandaMicroToolElectroniclevelortestmaterialandbubble
level.
Step Action
1.
Adjusttheendeffectorsoftherobotasrequired.
2.
LeveltheMarathonExpressensuringtherotationaxisoftheMagnaTran7robotisperpendicularto
thereferenceplaneofthechamberandthattheMaterialTransportPlaneissetto1100mm.
3.
LeveltheProcessModule(s)ensuringthematerialstageisparalleltothereferenceplaneoftheMara-
thonExpressandthattheMaterialTransportPlaneissetto1100mmperSEMIE21,andattachtothe
MXsystem.
4.
AttachtheLoadLockModulestotheMXsystemifrequiredandleveltoensurethematerialcarrier
planeisparalleltothereferenceplaneofthesystem.
5.
ConfiguretherobotforoperationwithintheMarathonExpress.
6.
Teachthehandoffpositions(aligner,loadlocks,processmodules,etc.)intheMarathonExpressfor
therobot.
7.
Testthesystemalignmentbyrunningaseriesoftestmaterialtoensurepropermaterialtransport
throughouttheMarathonExpresssystem.
SystemAlignment-MechanicalAlignment
Thefirstphaseofthesystemalignmentprocedure,calledtheMechanicalAlignmentPhase,is
performedtoensuremechanicalintegritybetweenthemotionoftherobotarmandthestationsit
serves.Thisphaseconsistsofadjustingandaligningmechanicalcomponentsofthesystemto
ensureproperoperationandtopreventanyaccidentalcontactorinterferencebetweenmovingand
staticelementsofthesystemduringmaterialtransferoperations.Themechanicalalignmentphase
includesrobotendeffectoradjustment,systemcomponentadjustment(e.g.,CassetteElevator’s
platform),andprogrammingactualstationvalues(R,T,andZ)intotherobot.Theseproceduresare
generallyperformedusingfixtures(suppliedwiththesystem)andmeasuringinstruments(e.g.,
scales,dialindicators,etc.).Anotherveryusefultoolistherobot'sControlDisplayModule(CDM),
whichprovidesverypreciselocalcontroloftherobot.
Copyright © 2023, Brooks Automation, Inc.
143