6. Operation Marathon Express
Determining Material Locations Part Number: 605914 Rev. B
Step Action
7.
AlignwaferandplaceintotheProcessModule.Transfercooledwaferbacktocarrier.Transferwafer
fromProcessModuletocooler.
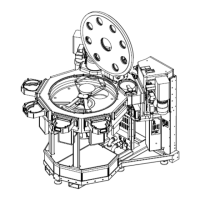
a. ThehostcontrollerinstructstheTopLignertoorientthefiducialofthewaferandtheMagnaTran
7robottopickthewaferfromthealigner.
Thealignermeasurestheeccentricityifrequiredandcommunicatesthepositionofthewaferto
thehostcontroller.ThehostcontrollermayinstructtheMagnaTran7robottocenterthewafer
ontheendeffectorifnecessaryduringthepick.
b. ThehostcontrolleropenstheslotvalvetothefirstProcessModule.
c. ThehostcontrollerinstructstheMagnaTran7robottoplacethecenteredandorientedwafer
intothefirstProcessModule.
d. ThehostcontrollerclosestheslotvalvetotheProcessModule.
e. ThehostcontrolleropenstheslotvalvetotheLoadLock.
f. ThehostcontrolleropenstheTopCoolerPoppet.
g. ThehostcontrollerinstructstheMagnaTran7robottoplacethecooledwaferintotheLoad
Lock.
h. ThehostcontrollerclosestheslotvalvetotheLoadLock.
i. ThehostcontrolleropenstheslotvalvetothesecondProcessModule.
j. ThehostcontrollerinstructstheMagnaTran7robottotransferthewaferfromtheProcess
ModuletotheTopCooler.
k. ThehostcontrollerclosestheTopCoolerPoppetandstartsacoolcycle.
l. ThehostcontrollerclosestheslotvalvetotheProcessModule.
8.
Thecycle(Step6andStep7)repeatsuntilallwafersinthecarrierhavebeenprocessed.
9.
Onceallofthewaferswithinthewafercarrierhavebeenprocessed,thewafercarrierisremovedand
replacedwiththenextcarriertobeprocessed.
a. ThehostcontrollerinitiatesaventoftheLoadLock.
b. ThewafercarrierisremovedfromtheVCELoadLock.
10.
Theprocess(Step1throughStep9)repeatsforeachwafercarrier.
Determining Material Locations
ThereareseveralwaystodeterminematerialpresencewithintheMarathonExpressasdescribed
below.
Pick and Place Commands
Therobotwillassumeithasmaterialontheendeffector(s)afterpower-up.Therobotwillassumeit
hasmaterialafteraPICKcommandatastationwithoutsensors.Therobotwillassumeitdoesnot
havematerialafteraPLACEcommandatastationwithoutsensors.Forstationswithsensorsthe
robotwillcheckthestationsensortoverifythatthePICK/PLACEwassuccessful.
UsetheRQLOADcommandtorequesttherobot’sassumption.Toresettheloadflag,usetheSET
LOADcommand.Therobot’sknowledgeofmaterialpresenceisusedtoregulatethespeedofthe
robot.
114
Copyright © 2023, Brooks Automation, Inc.