Brooks Automation 9. Maintenance and Repair
Part Number: 605914 Rev. B Adjusting the Robot’s End Effector(s)
Step Action
6.
Reconnectallpower,communications,andairconnections,thenre-energizethesystemfollowingthe
"Power-upSequence"onpage79.
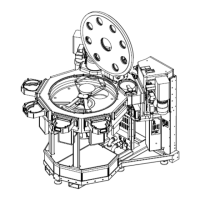
Adjusting the Robot’s End Effector(s)
Theendeffectoroftherobotmustbeadjustedforplanarmotionwithinthematerialdeliveryzoneof
anymaterialtransfer.Thisadjustmentproceduremustbeperformedatthematerialdeliveryzone.
Thisprocedureisperformedduringinitialsetupandatanytimethattherobot’sarmsorendeffector
(s)aredamaged,removedandreplaced,orchanged.Itisalsorecommendedtoperformthis
procedureasapreventativemaintenanceprocedure.
NOTE: Thisprocedureassumesthattheendeffectorisproperlylocatedinthearm,is
flat,andthatthetopsurfacesofthematerialsupportpadsarewithin0.076mm(0.003
in)ofeachother.
ProcedureCategory
Type1Procedure:Equipmentisfullyde-energized.
RequiredToolsandTestEquipment
l
Metrichexwrenches
l
Therobot’sTeachPendant
l
MicroToolWaferLevel
LimitsandTolerances
l
Theendeffectormustbelevelwithin0.02degrees
AdjustmentStrategy
ThisprocedureusesthebottomsurfaceofaProcessModuleasareferencepointtodetermine
planarmovementwithinthematerialdeliveryzone.Thearmshouldbeextendedtothedelivery
zonewhilemeasuringtheendeffectorrunout.Turnoffanddisconnectallpower,communications,
andairconnectionsasdetailedinthe"AdjustmentProcedure"onpage186.
Copyright © 2023, Brooks Automation, Inc.
185