Brooks Automation 8. System Alignment
Part Number: 605914 Rev. B Teaching Pan ’B’ on a Dual End-Effector Arm Set
Referto"StationCoordinateSystem"onpage108foranillustrationofstationassignments.
Step Action
1.
Usingtherobot’sCDM,teachtherobottheR,T,andBTOvaluesfortheProcessModule.
SETUP -> STATIONS -> n -> CR -> LEARN R, T, BTO -> HAND LOCATE
(wherenisthestationnumberfortheProcessModule)
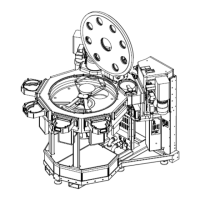
a. Manuallymovetherobot’sendeffectorwithatestwaferproperlycenteredonit(bythealigner)
intotheProcessModule,adjustingZasnecessarysothewaferclearsthemodule’swafer
supports(1.5mm(0.06in)minimum).
b. OncetheendeffectorispositionedcorrectlysavetheR,T,andBTOvaluesfortherobotusing
theCDM.
ESCAPE -> STORE -> R -> T -> BTO -> QUIT
2.
Teachtherobottheamountitmusttraveldowntodepositthewaferandprovidetheendeffectorclear-
ancewhilemovingunderthewafer.
SETUP -> STATIONS -> n -> CR -> LEARN LOWER -> JOG
(wherenisthestationnumberfortheProcessModule)Jogthewaferdownintopositionandcontinue
joggingdownsotheendeffectoris3.18mm(1/8in)belowthewafer.
3.
OncethewaferandendeffectorarepositionedcorrectlysavetheLowervalueusingtheCDM.
ESCAPE -> STORE -> L -> QUIT
4.
RecordtheStationcoordinatesintheappropriateworksheetprovidedinAppendixC:"StationIden-
tification"onpage221.
5.
RepeattheprocedureforeachProcessModuleusingtheappropriatestationnumber.
TeachingthevacuumrobotthecoordinatesoftheProcessModulesisnowcomplete.Return
controloftherobottothehostcontrollerandshutofftheCDM.
Teaching Pan ’B’ on a Dual End-Effector Arm Set
Whenusingadualendeffectorarmonarobotbothendeffectors,referredtoaspan’A’andpan’B’
mustbetaughtallstations.Theeasiest,andmostreliable,methodforteachingpan’B’allstationsis
tosimplycalculatethepan’B’valuesforeachstationbasedonthepan’A’valuesalreadyobtained.
Seetherobotmanualforinstructionsoncalculatingthepan’B’values.
RecordtheStationcoordinatesintheappropriateworksheetprovidedinAppendixC:"Station
Identification"onpage221.
Copyright © 2023, Brooks Automation, Inc.
169