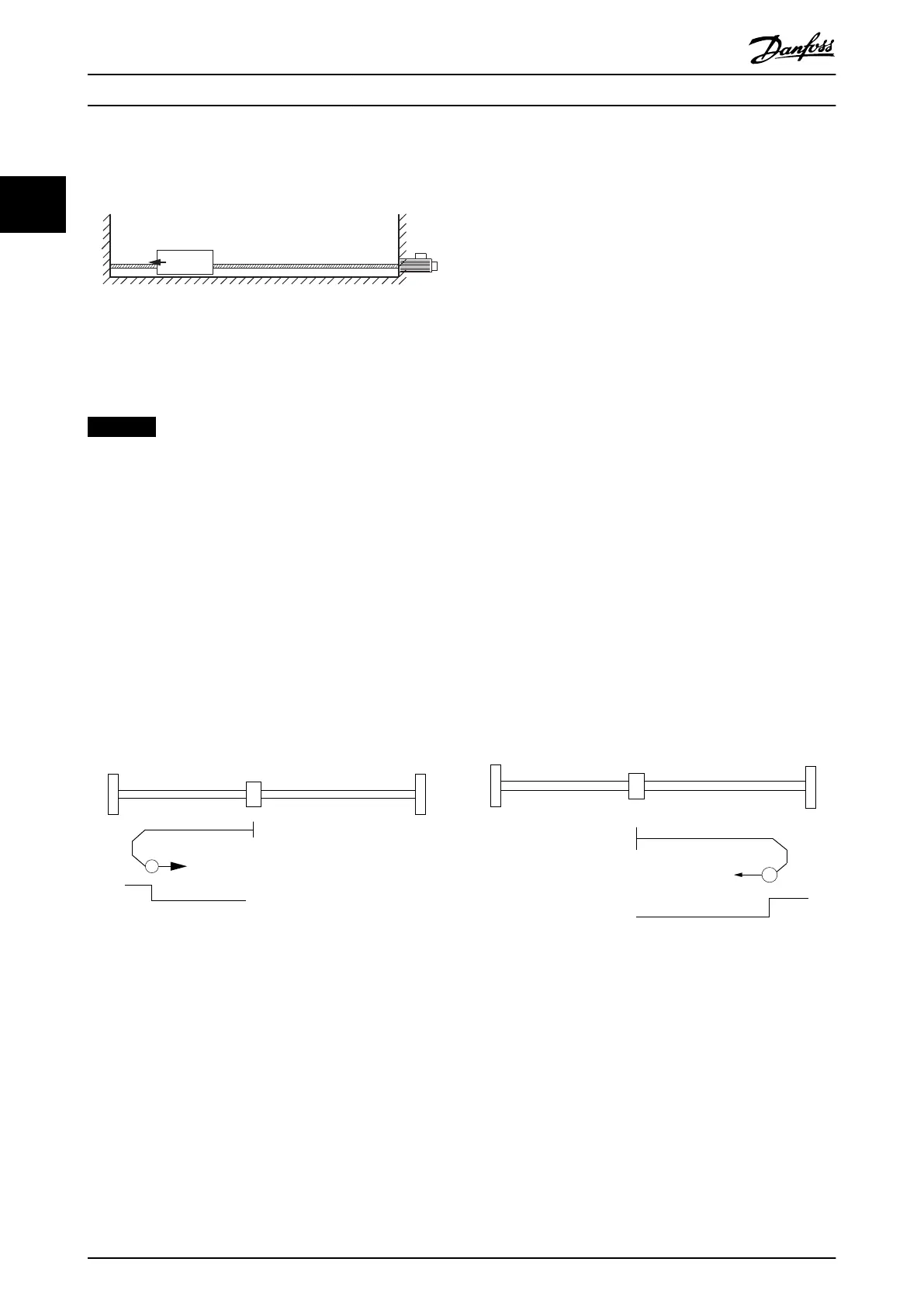
2.4.4.2 Homing on Positive/Negative Block
Illustration 2.30 Example of Homing Method on Block
Method –1 Homing on negative block and method –2 Homing on positive block perform a homing against a physical object
that mechanically blocks the movement. A limit switch or home switch is not required.
NOTICE
An inadequate torque limit during the homing process
may result in damage to mechanics.
The servo drive is considered as blocked if the actual speed falls below the Homing blocking window velocity for the
specied Homing blocking window time (see chapter 7.13.6 Parameter 52-45 to 52-48: Additional Homing objects (0x2040)) and
the torque limit is reached (see chapter 7.5.12 Parameter: Maximum Torque (0x6072) and chapter 7.5.13 Parameters 52-15,
52-23, and 52-36: Application Torque Limit (0x2053)).
When the motor is blocked, the actual position is the home position. The motor then ramps down to 0 velocity using the
homing deceleration value and the successful homing procedure is reported.
The dierences between the 2 methods are:
•
Homing on negative block (–1): Motor moves with negative speed.
•
Homing on positive block (–2): Motor moves with positive speed.
2.4.4.3 Homing on Positive/Negative Limit Switch
Illustration 2.31 Homing Method 17: Homing on Negative
Limit Switch
Illustration 2.32 Homing Method 18: Homing on Positive Limit
Switch
Homing methods 17: Homing on negative limit switch or 18: Homing on positive limit switch can be used if a limit switch is
available (and congured using object 0x200F, see chapter 7.21.3 Parameter: Dual Analog User Inputs Conguration (0x200F)),
so that the limit switch signals the home reference point.
The dierences between the 2 methods are:
•
17: Homing on negative limit switch: Motor moves with negative speed to reach the negative limit switch.
•
18: Homing on positive limit switch: Motor moves with positive speed to reach the positive limit switch.
When starting the homing procedure, the servo drive starts moving with the dened velocity value set in object 0x6099
sub-index 01: Speed during search for switch (see chapter 7.13.3 Parameters 52-42 and 52-43: Homing Speeds (0x6099)). The
direction depends on the selected method (positive or negative). As soon as a rising edge is detected on the limit switch,
the motor reverses direction and ramps to the velocity set in object 0x6099 sub-index 2: Speed during search for zero (see
Servo Drive Operation
VLT
®
Integrated Servo Drive ISD
®
510 System
36 Danfoss A/S © 01/2017 All rights reserved. MG36D102
22

 Loading...
Loading...







