3 Function diagrams
3.13 Vector control
SINAMICS G120 Control Units CU240B-2/CU240E-2
664 List Manual (LH11), 01/2016, A5E33839529
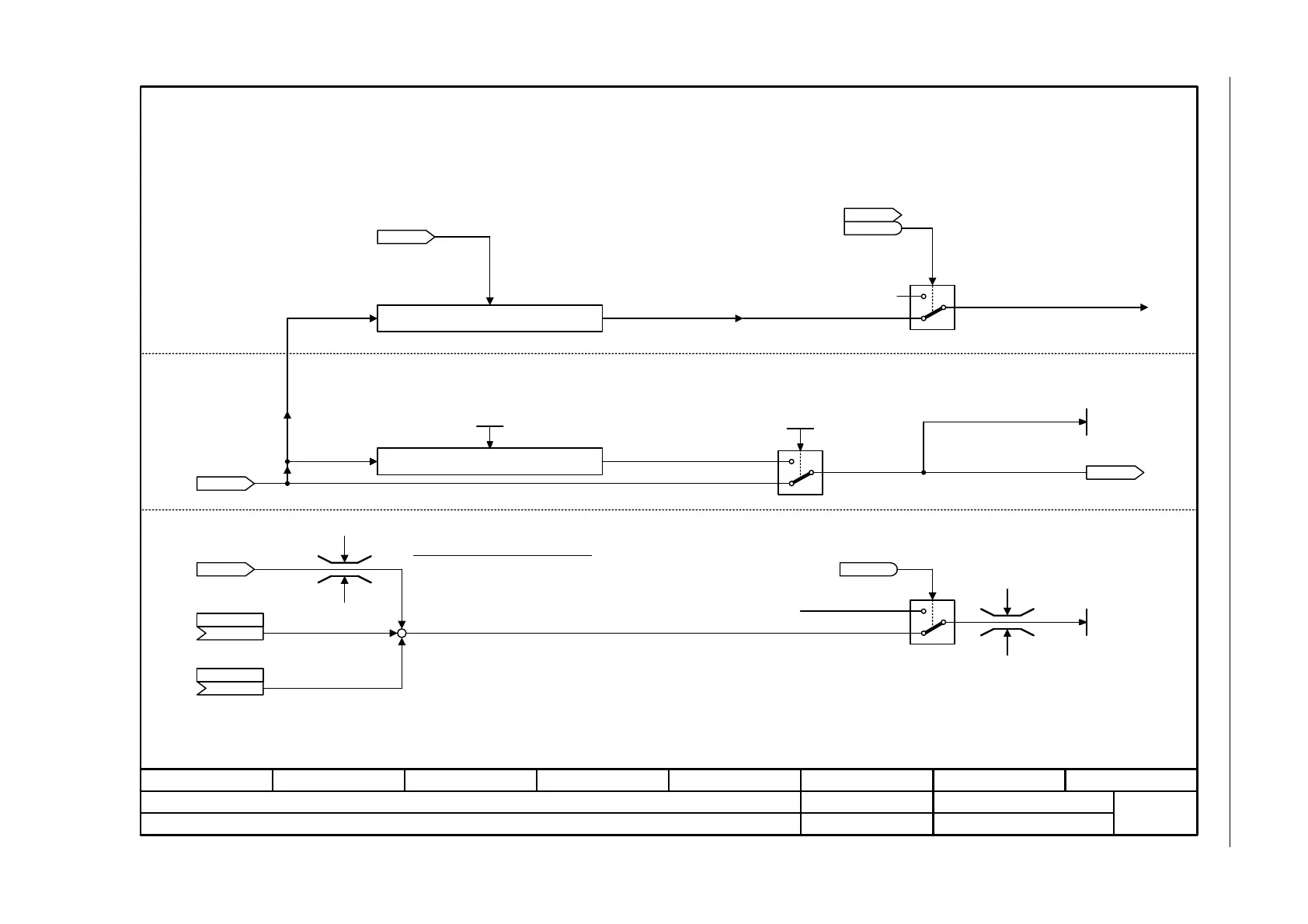
Fig. 3-91 6031 – Precontrol balancing, acceleration model
- 6031 -
Function diagram
87654321
fp_6031_97_53.vsd
Vector control
G120 CU240B/E-2
09.12.2015 V4.7.6
Pre-control balancing, acceleration model
[6060.1]
0
0
1
[2526.6]
[6040.1]
[6030.8]
0
>0
+
0
1
+
+
Acceleration calculation
ZSW cl-loop ctrl
r0056
r0056
.14
Calculated accelerating torque
r1438
n_ctrl n_set [rpm]
Pre-control balancing
n_C n_act T_s SL
0.00 ... 32000.00 [ms]
p1452 [D] (10.00)
r0062
n_set after filter [rpm]
n_set I_comp
r1439
n_ctrl n_set stat
r1444
PcCtrl active
r0807
n_set via PC
Steady-state setpoint calculation
r1119
RFG setp at inp [rpm]
n_ctrl n_set 1
(0)
p1155 [C]
n_ctrl n_set 2
(0)
p1160 [C]
a_prectrl scal
0.0 ... 10000.0 [%]
p1496 [D] (0.0)
[6040.1]
.0
r1084
r1087
r1084
r1087
[3050.8]
r1493
M_inert tot scal [kgm²]
[6035.8]

 Loading...
Loading...













