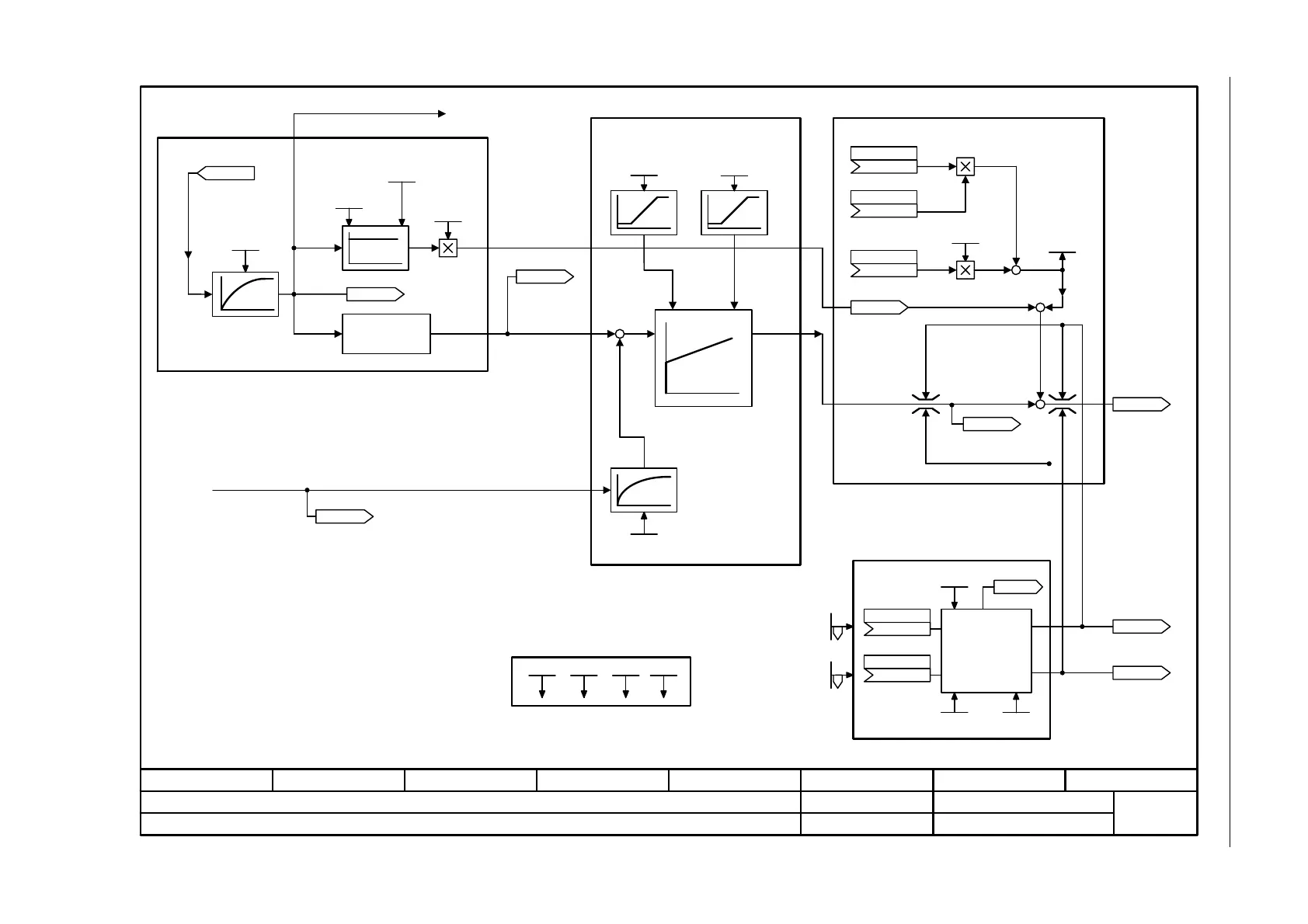
Fig. 3-120 6820 – Speed control and generation of the torque limits, overview (p0096 = 2)
- 6820 -
Function diagram
87654321
fp_6820_97_56.vsd
Vector control, Dynamic Drive Control
G120 CU240B/E-2
09.12.2015 V4.7.6
Speed control and generation of the torque limits, overview (p0096 = 2)
p1400 p1401 r0056 r1408
n_modell
[6821.1]
[3001.8]
[6821.1]
Symmetrizing
[6490] Closed-loop speed control configuration
[6491] Closed-loop flux control configuration
[2526] Status word closed-loop control (r0056)
[2530] Status word closed-loop current control (r1408)
r0062
n_set after filter [rpm]
n_C n_act T_s SL
p1452
r1438
n_ctrl n_set [rpm]
Mot M_mom of inert
p0341
Mot MomInert Ratio
p0342
n_ctrl SL Kp
p1470
n_ctrl SL Tn
p1472
r1518
M_accel [Nm]
r1508
M_set bef. M_suppl [Nm]
r0079
M_set [Nm]
r1538
M_max upper eff [Nm]
r1539
M_max lower eff [Nm]
M_max upper
p1520 [D] (0.00)
M_max lower
p1521 [D] (0.00)
a_prectrl scal
p1496
n_set_filt 1 T
p1416
[6822]
[6824]
[6826]
r1170
n_ctrl setp sum [rpm]
r0063[0..2]
n_act [rpm]
Kp Tn
n_pre-control
[0]
Kp adaptation Tn adaptation
–
Speed setpoint, Pre-control balancing, acceleration model (p0096 = 2)
Speed controller with Kp_n/Tn_n
adaptation (p0096 = 2)
Torque setpoint (p0096 = 2)
[6828] Current/power/torque limits (p0096 = 2)
For Kp
adaptation
M_suppl 1
(0)
p1511 [C]
M_suppl 1 scal
(0)
p1512 [C]
M_suppl 2
(0)
p1513 [C]
M_suppl 2 scal
p1514
M_suppl total
r1515
r0067
I_Ausg max
Generating the
torque limits
M_max upper
(1520[0])
p1522 [C]
M_max lower
(1521[0])
p1523 [C]
Current limit
p0640
P_max mot
p1530
P_max gen
p1531

 Loading...
Loading...













