VA Motion Controller Programming Manual
110
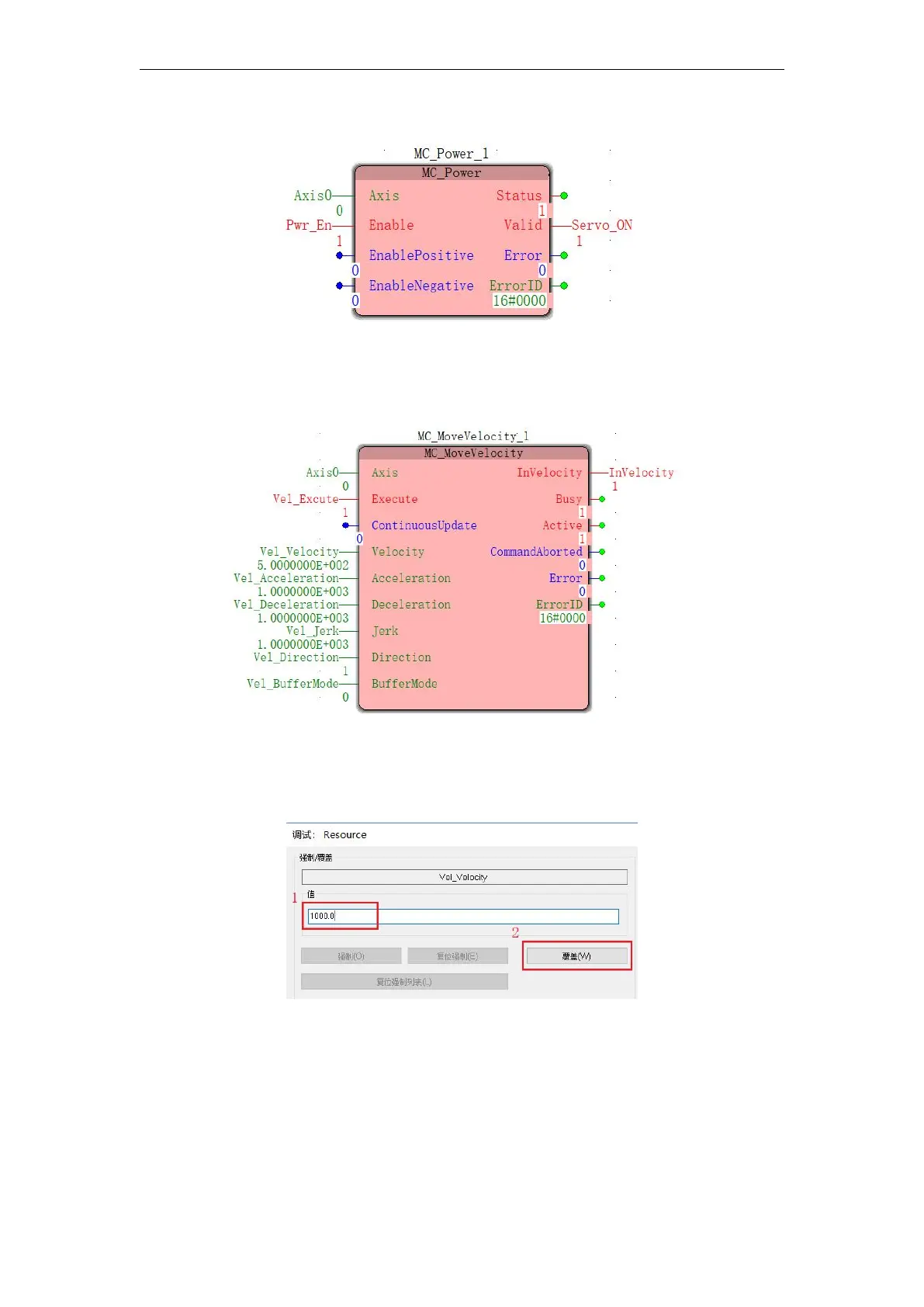
and the servo is enableDAt the same time through the motion controller output.
Debug
2
: Similarly, double-click
Vel_ Excute
to change its value from
False
to
Ture
. The
controller starts sending analog commands to the servo. The motor starts to accelerate in
the positive direction . When
InVelocity changes
from
False
to
True
, the speed reaches the preset.
Value
5 00 . 0
;
Commissioning
3
: Double-click
Vel_Velocity
, in the pop-up debug window
reassigned
1 000 . 0
, click on the cover, and then re-trigger a
Vel_Excute
the update rate , the
motor speed will follow the preset acceleration and deceleration of
5 00 . 0
accelerated
to
1 000 . 0
;
Debug
4
: Double-click
Stp _Excute
to change its value from
False
to
Ture
. The motor will
decelerate according to the preset deceleration until it stops. WheNS
tp _Done
changes
from
False
to
True
, it stops.