VA Motion Controller Programming Manual
590
Appendix IV CANopen Instructions
1. CANopen communication connection
1.1 Description Motion Controller Connection Ports
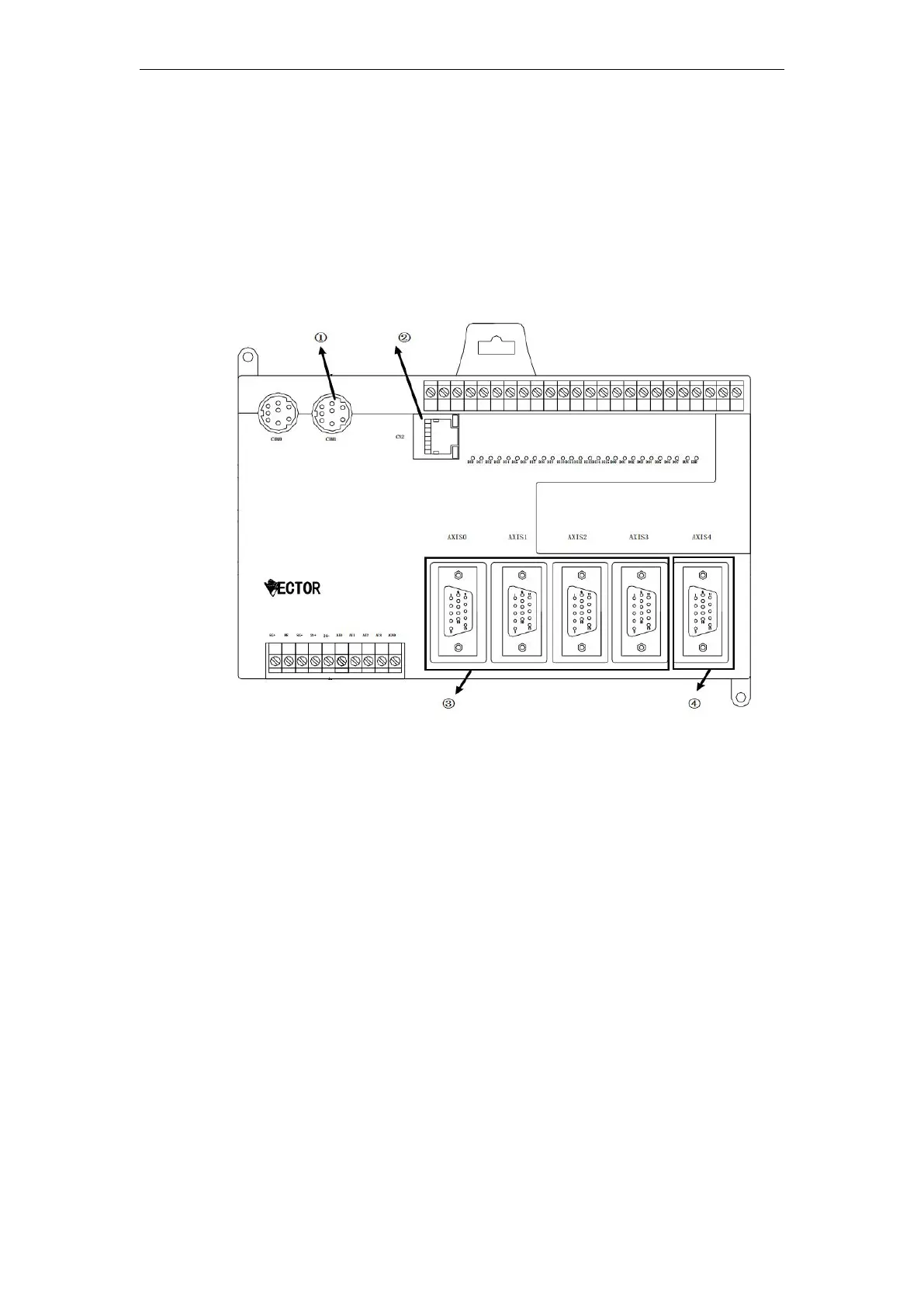
As the picture shows:
① CANopen communication port, through this interface the data exchange with the slave
node, and a transceiver transmitting a synchronization signal sync packet;
② 100M Ethernet port, through this interface to upload and download programs online
monitoring;
③AXIS0 ~ AXIS3 invalid type for CANopen;
④ AXIS4 spindle interface axis number is 16, only instructions for the spindle to make a
multi-axis (or the encoder connected to the pulse generator), it is noted that the same analog with
other interface functions.