VA Motion Controller Programming Manual
14
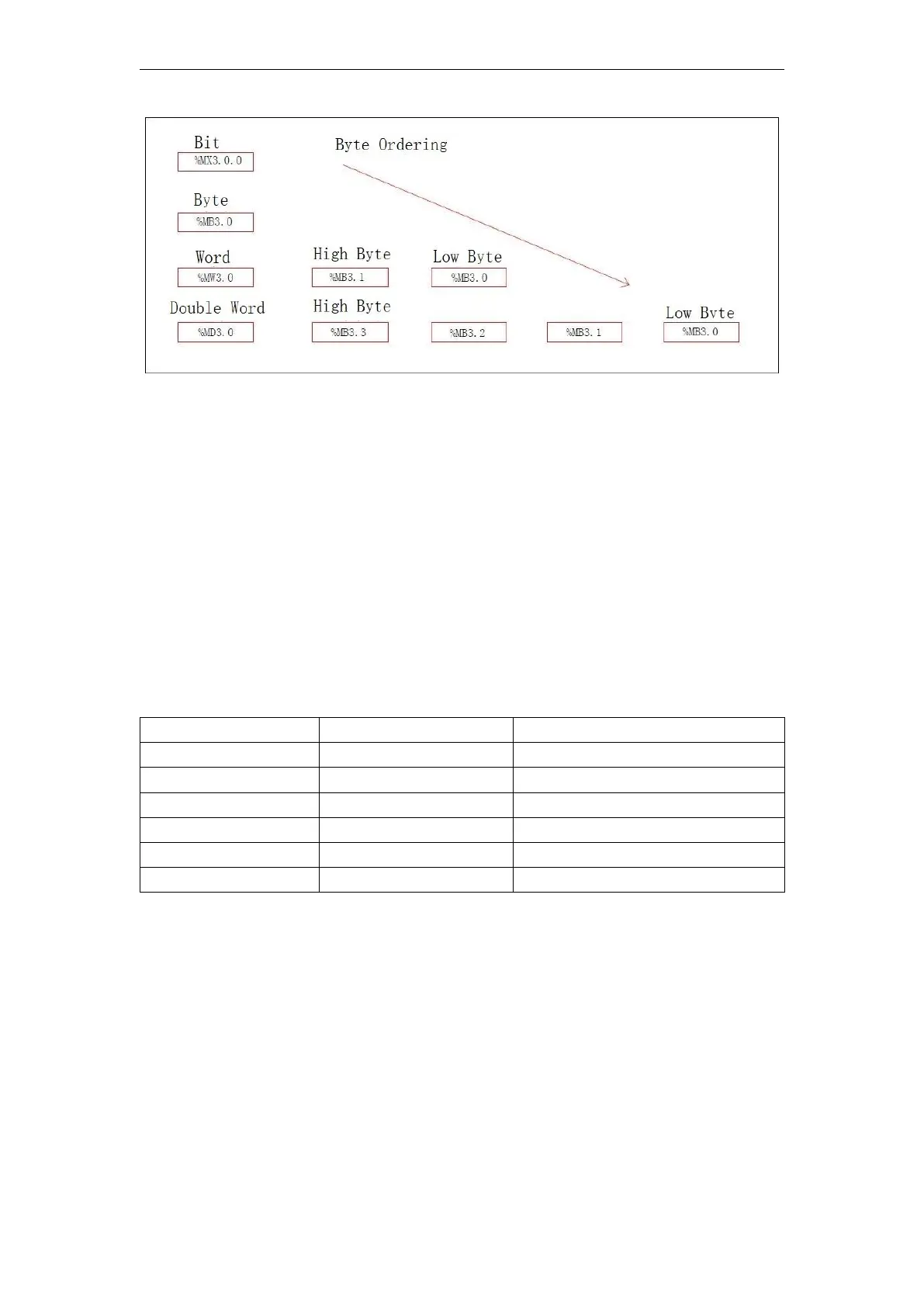
For example, if a hexadecimal number 16#1234 is stored in %MW3.0, then 16#34 exists
in %MB3.0, and 16#12 is stored in %MB3.1. If the bit operation in the program affects the byte,
worDAnd double word of the bit, the reverse is also true.
Example of a variable address
%MX3.0.0 represents the 0th bit of the 0th byte in the intermediate variable area;
%MB3.0 represents the 0th byte in the intermediate variable area;
%MW3.0 represents the 0th word in the intermediate variable area;
%MD3.4 represents 1 double word starting from the 4th byte in the intermediate variable area
Note: (The 5.3 version of 1 byte can only define 1 bit, such as %MX3.0.0, (indicating that one
byte has been occupied), the user can no longer use %MX3.0.1~%MX3.0.7, if you need to define
One bit, the user needs to start with %MX3.1.0.)
The PLC supports the input of constant values. The constants can be binary numbers, decimal
numbers, hexadecimal numbers, strings, ASCII codes or real numbers. The input format is shown
in the table below.
3.3 PLC Save Data
1) First, let's take a look at the approximate workings of the motion controller's internal
memory. The internal memory of the motion controller is divided into two types: RAM random
access memory and ferroelectric permanent memory. We all know that the data of the RAM
memory must be maintained by the power supply. When the power supply of the memory chip is
interrupted, the data stored therein does not exist anymore. The RAM memory is mainly useDAs a
real-time access space for the program and program data of the motion controller program. The
ferroelectric memory is a charged rewritable memory, and its data can be stored for a long time